КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Переносного руху
|
|
|
|
Додавання прискорень в загальному випадку
Теорема. (кінематична теорема Коріоліса) Абсолютне прискоренння точки є векторною сумою трьох прискорень - переносного, відносного і Коріоліса:.  .
.
Доведення. Абсолютне прискоренння точки  визначимо обчисленням повної похідної за часом від абсолютної швидкості:
визначимо обчисленням повної похідної за часом від абсолютної швидкості:

Для похідних від векторів  и
и  застосуємо формулу Бура. Отримаємо
застосуємо формулу Бура. Отримаємо
 ,
,  .
.
Враховуючи, що  ,
,  ,
,  ,
,  , отримаємо для абсолютного прискорення
, отримаємо для абсолютного прискорення

| (15.8) |
В У цій формулі перші три складові є переносним прискоренням для точки  . Остання складова називається прискоренням Коріоліса (іноді його називають додатковим або поворотним прискоренням) і обчислюється
. Остання складова називається прискоренням Коріоліса (іноді його називають додатковим або поворотним прискоренням) і обчислюється  .
.
У підсумку формула (9.8) приймає виднабуває вигляду

| (15.9) |
Що що і й треба було довести.
Прискорення Коріоліса
Теорема (Правило Жуковського). Щоб отримати напрямок прискорення Коріоліса, необхідно вектор проекції відносної швидкості повернути на  навколо осі, паралельної осі переносного обертання в направленні напряміцього обертання.
навколо осі, паралельної осі переносного обертання в направленні напряміцього обертання.
Модуль прискорення Коріоліса дорівнює подвоєному добутку кутової швидкості переносного обертання на модуль проекції відносно швидкості на плоскістьплощину, перпендикулярну осі переносного обертання:

Спроектувавши обидві частини рівності  на рухомі осі координат, одержимо вирази для проекцій коріолісового прискорення:
на рухомі осі координат, одержимо вирази для проекцій коріолісового прискорення:

де  ,
,  ,
,  – проекції кутової швидкості на осі координат;
– проекції кутової швидкості на осі координат;  ,
,  ,
,  – проекції відносної швидкості на ці самі осі координат. Тоді модуль коріолісового прискорення
– проекції відносної швидкості на ці самі осі координат. Тоді модуль коріолісового прискорення
 .
.
Напрям  визначається за напрямними косинусами кутів, які вектор
визначається за напрямними косинусами кутів, які вектор  утворює відповідно з ортами
утворює відповідно з ортами  рухомих осей:
рухомих осей:

Випадки перетворення на нуль коріолісового прискорення. Коріолісове прискорення дорівнює нулю в ті моменти (або на тих проміжках часу), коли:
1) вектор  дорівнює нулю, тобто переносний рух є поступальним;
дорівнює нулю, тобто переносний рух є поступальним;
2) відносна швидкість  дорівнює нулю, тобто немає відносного руху;
дорівнює нулю, тобто немає відносного руху;
3)  , тобто коли вектори і є колінеарними.
, тобто коли вектори і є колінеарними.
Фізичні причини виникнення коріолісового прискорення. Коріолісове прискорення виникає внаслідок двох причин:
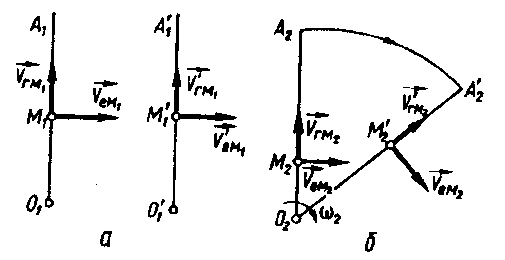
| Рисунок 15.3 |
 та
та  відповідно відносну та переносну швидкості точки М. Переносним рухом точки М1 (рис. 15.3, а) є поступальний рух, зумовлений рухом відрізка. Через елементарний проміжок часу відрізок О1А1 займе положення
відповідно відносну та переносну швидкості точки М. Переносним рухом точки М1 (рис. 15.3, а) є поступальний рух, зумовлений рухом відрізка. Через елементарний проміжок часу відрізок О1А1 займе положення  . Оскільки переносний рух – поступальний, то переносні швидкості М1 і
. Оскільки переносний рух – поступальний, то переносні швидкості М1 і  однакові.
однакові.Переносним рухом точки М2 (рис. 15.3, б) є обертальний рух, спричинений обертанням відрізка О2А2 навколо точки О2. Тому переносні швидкості точки М2 на відрізку О2А2 та  різні:
різні:  ;
;  .
.
Отже переносна швидкість точки М2 змінюється залежно від її відносного руху вздовж відрізка О2А2. При цьому швидкість змінення зміни переносної швидкості  точки М2 у часі, яка створює додаткове прискорення, пропорційна відносній швидкості
точки М2 у часі, яка створює додаткове прискорення, пропорційна відносній швидкості  та кутовій швидкості переносного руху
та кутовій швидкості переносного руху  .
.
2. Відносна швидкість точки М2, тобто , залежить від переносного обертального руху, оскільки при обертанні відрізка О2А2 змінюється напрям відносної швидкості (рис. 15.3, б).
Отже, швидкість змінення зміни в часі відносної швидкості точки (тобто прискорення точки, яке залежить від наведеної вище причини) також буде пропорційною відносній швидкості та кутовій швидкості переносного руху.
Таким чином, коріолісове прискорення характеризує змінення зміну в часі відносної швидкості через переносний непоступальний рух і переносної швидкості – через відносний рух точки.
Лекція 16
Короткий зміст: Синтез рухів. Пара обертань. Додавання поступального і обертального рухів.
Складний рух твердого тіла.
Постановка задачі синтезу рухів.
Дотепер ми займалися аналізом рухів: прагнучиі вивчити складний рух, ми розкладали його на простіші рухи. Часто виникає обернена задача, або задача синтезу чи складання рухів: утворити (побудувати та вивчити) складний рух тіла з простіших рухів. Постановка задачі: в кожний даний момент часу при різних часткових припущеннях про характер відносного та переносного рухів знайти вигляд того результуючого складного руху, якому відповідає розподіл абсолютних швидкостей точок тіла в цей момент. Тобто мова йтиме про складання миттєвих (нескінченно малих) переміщень тіла.
Оскільки розподіл швидкостей точок твердого тіла в даний момент залежить від його поступальної і кутової швидкостей в у цей момент, то цю таку задачу можна ще назвати задачею про складання векторів миттєвих поступальних і кутових швидкостей тіла. Складові рухи комутативні в тому сенсі, що миттєвий розподіл швидкостей результуючого руху не зміниться, якщо відносний і переносний рухи поміняти місцями.
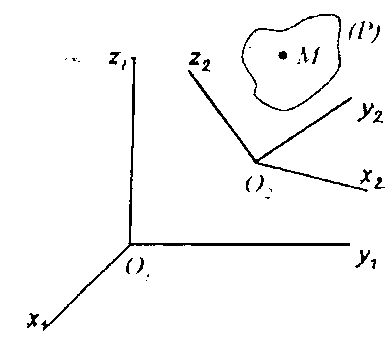
Введемо нерухому систему координат  . Нехай тверде тіло (Р) рухається відносно системи координат
. Нехай тверде тіло (Р) рухається відносно системи координат  , яка, в у свою чергу, переміщується відносно системи . У цьому випадку кажутьговорять, що тіло здійснює складний рух, який складається з двох складових рухів (рис. 16.1).
, яка, в у свою чергу, переміщується відносно системи . У цьому випадку кажутьговорять, що тіло здійснює складний рух, який складається з двох складових рухів (рис. 16.1).
У більш загальних випадках складний рух може складатись з n складових рухів. При цьому маємо n систем координат і задається n рухів: рух тіла відносно системи координат  , рух системи
, рух системи  відносно системи
відносно системи  і т. д. Нарешті задається рух системи відносно нерухомої системи . Рух тіла або рух якої-небудь однієї системи координат відносно іншої в загальному випадку нічим не обмежено. Задача полягає в знаходженні залежностей між основними характеристиками складових рухів і складного руху.
і т. д. Нарешті задається рух системи відносно нерухомої системи . Рух тіла або рух якої-небудь однієї системи координат відносно іншої в загальному випадку нічим не обмежено. Задача полягає в знаходженні залежностей між основними характеристиками складових рухів і складного руху.
Додавання поступальних рухів
| Рисунок 16.1 |
на рис. 16.1 рухається поступально відносно нерухомої системи координат зі швидкістю  . Через
. Через  позначимо швидкість поступального руху тіла (Р) відносно системи . Тоді рух тіла відносно системи є складним: його рух стосовно відносно тріедра можна трактувати як відносний (
позначимо швидкість поступального руху тіла (Р) відносно системи . Тоді рух тіла відносно системи є складним: його рух стосовно відносно тріедра можна трактувати як відносний ( ), а рух тріедра стосовно тріедра є переносним
), а рух тріедра стосовно тріедра є переносним  . Рух точки
. Рух точки  відносно системи є абсолютним, швидкість цього руху можна знайти за формулою. Оскільки
відносно системи є абсолютним, швидкість цього руху можна знайти за формулою. Оскільки  , то
, то
 .
.
Таким чином, абсолютні швидкості всіх точок тіла виявилися однаковими. Отже, при додаванні поступальних рухів твердого тіла результуючий рух буде також поступальним. Швидкість результуючого руху дорівнює сумі швидкостей складових рухів. Для n поступальних рухів:
 .
.
Коли дві складові руху є поступальними, то (на відміну від усіх наступних випадків) теорема про додавання швидкостей формулюється і доводиться однаково як для миттєвих, так і для скінченних переміщень.
Рух, в якому швидкості всіх точок тіла тільки в даний момент часу виявляються рівними між собою, називається миттєво поступальним. Прискорення точок при цьому різні.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 2042; Нарушение авторских прав?; Мы поможем в написании вашей работы!