КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематика точки. Изучение данных вопросов необходимо в дальнейшем для динамики движения материальной точки, динамики относительного движения точки
|
|
|
|
Изучение данных вопросов необходимо в дальнейшем для динамики движения материальной точки, динамики относительного движения точки, динамики вращательного движения точки, для решения задач в дисциплинах «Теория машин и механизмов» и «Детали машин».
Санкт-Петербург, Межевой канал, 2.
Отпечатано в типографии ФГОУ ВПО СПГУВК,
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Методические указания к расчетно-графическим работам
Печатается в авторской редакции
Подписано в печать Сдано в производство
Форм. бум. 60х84 1/16 Офсетная печать
Усл.- печ. л. Усл.- изд. л.
Тираж экз. Зак. №
Санкт-Петербургский государственный университет водных коммуникаций
198035,Санкт-Петербург, ул. Двинская, 5/7
Кинематика точки и твердого тела
Введение в кинематику
Кинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их инертности (массы) и действующих на них сил.
Под движением мы понимаем в механике изменение, с течением времени положения данного тела в пространстве по отношению к другим телам.
Для определения положения движущегося тела (или точки) в разные моменты времени с телом, по отношению к которому изучается движение, жестко связывают какую-нибудь систему координат, образующую вместе с этим телом систему отсчета.
Изображать систему отсчета будем в виде трех координатных осей (не показывая тело, с которым они связаны).
Движение тел совершается в пространстве с течением времени. Пространство в механике мы рассматриваем, как трехмерное евклидово пространство.
Время является скалярной, непрерывно изменяющейся величиной. В задачах кинематики время t принимают за независимое переменное (аргумент). Все другие переменные величины (расстояния, скорости и т. д.) рассматриваются как изменяющиеся с течением времени, т, е. как функции времени t.
Для решения задач кинематики надо, чтобы изучаемое движение было как-то задано (описано).
Кинематически задать движение или закон движения тела (точки) - значит задать положение этого тела (точки) относительно данной системы отсчета в любой момент времени.
Основная задача кинематики точки и твердого тела состоит в том, чтобы, зная закон движения точки (тела), установить методы определения всех кинематических величин, характеризующих данное движение.
СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
Для задания движения точки можно применять один из следующих трех способов:
1) векторный, 2) координатный, 3) естественный.
1. Векторный способ задания движения точки.
Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор r, проведенный из начала координат О в точку М (рис. 1).
При движении точки М вектор  будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:.
будет с течением времени изменяться и по модулю, и по направлению. Следовательно, является переменным вектором (вектором-функцией), зависящим от аргумента t:.
 .
.
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор и найти положение движущейся точки.
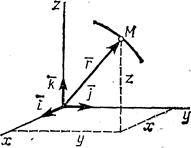 Геометрическое место концов вектора , т. е. годограф этого вектора, определяет траекторию движущейся точки.
Геометрическое место концов вектора , т. е. годограф этого вектора, определяет траекторию движущейся точки.
2. Координатный способ задания движения точки.
Положение точки можно непосредственно определять ее декартовыми координатами х, у, z, которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т. е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т. е. знать зависимости
 .
.
4 Рис.1
Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения.
3. Естественный способ задания движения точки.
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис, 2) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и
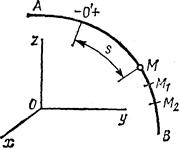 отрицательное направления отсчета (как на координатной оси).
отрицательное направления отсчета (как на координатной оси).
Тогда положение точки М на траектории будет однозначно
определяться криволинейной координатой s, которая равна
расстоянию от точки О' до точки М, измеренному вдоль дуги
траектории и взятому с соответствующим знаком. При движении
точка М перемещается в положения M1, М2,... следовательно,
расстояние s будет с течением времени изменяться.
Чтобы знать положение точки М на траектории в любой Рис.2
момент времени, надо знать зависимость
 .
.
Уравнение выражает закон движения точки М вдоль траектории.
ВЕКТОР СКОРОСТИ ТОЧКИ
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки. Введем сначала понятие о средней скорости точки за какой-нибудь промежуток времени. Пусть движущаяся точка находится
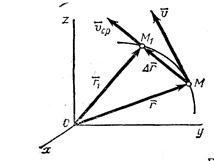
Рис.3
в момент времени t в положении М, определяемом радиусом-вектором r, а в момент t1 приходит в положение M1 определяемое вектором  (рис.3). Тогда перемещение точки за промежуток времени
(рис.3). Тогда перемещение точки за промежуток времени  определяется вектором
определяется вектором  который будем называть вектором перемещения точки. Из треугольника ОММ1 видно, что
который будем называть вектором перемещения точки. Из треугольника ОММ1 видно, что  ; следовательно,
; следовательно,  .
.
Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени 
 .
.
Скоростью точки в данный момент времени t называется векторная величина v, к которой стремится средняя скорость vср при стремлении промежутка времени  к нулю:
к нулю:
 ,
,  .
.
Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени.
Так как предельным направлением секущей ММ1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения.
 Вектор ускорения точки
Вектор ускорения точки
Ускорением точки называется векторная величина,
характеризующая изменение с течением времени модуля и
направления скорости точки.
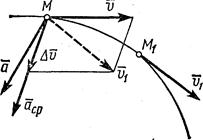
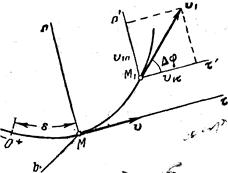
Пусть в некоторый момент времени t движущаяся
точка находится в положении М и имеет скорость v, а
в момент t1 приходит в положение M1 и имеет скорость Рис.4
v1 (рис. 4). Тогда за промежуток времени скорость точки получает приращение  . Для построения вектора
. Для построения вектора  отложим от точки М вектор, равный v1, и построим параллелограмм, в котором диагональю будет
отложим от точки М вектор, равный v1, и построим параллелограмм, в котором диагональю будет  , a одной из сторон
, a одной из сторон  . Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории.
. Тогда, очевидно, вторая сторона и будет изображать вектор . Заметим, что вектор всегда направлен в сторону вогнутости траектории.
Отношение приращения вектора скорости к соответствующему промежутку времени  определяет вектор среднего ускорения точки за этот промежуток времени:
определяет вектор среднего ускорения точки за этот промежуток времени:
 .
.
Вектор среднего ускорения имеет то же направление, что и вектор , т. е. направлен в сторону вогнутости траектории.
Ускорением точки в данный момент времени t называется векторная величина  , к которой стремится среднее ускорение
, к которой стремится среднее ускорение  при стремлении промежутка времени к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
при стремлении промежутка времени к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
Найдем, как располагается вектор по отношению к траектории точки. При прямолинейном движении вектор направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения , так же как и вектор  , лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M1 (рис. 4). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемойсоприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой.
, лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор направлен в сторону вогнутости траектории и лежит в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке M1 (рис. 4). В пределе, когда точка М стремится к М, эта плоскость занимает положение так называемойсоприкасающейся плоскости, т.е. плоскости, в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении движущейся точки. Следовательно, в общем случае вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой.
Определение скорости и ускорения точки при координатном способе задания движения
1. Определение скорости точки. Вектор скорости точки  , учитывая, что
, учитывая, что  найдем:
найдем:
 .
.
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени.
Зная проекции скорости, найдем ее модуль и направление (т.е. углы  , которые вектор v образует с координатными осями) по формулам
, которые вектор v образует с координатными осями) по формулам

2. Определение ускорения точки. Вектор ускорения точки  в проекции на оси получаем:
в проекции на оси получаем:

или
 ,
,
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул

где  - углы, образуемые вектором ускорения с координатными осями.
- углы, образуемые вектором ускорения с координатными осями.
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени.
Направлен вектор скорости по касательной к траектории, которая нам наперед известна.
Касательное и нормальное ускорение точки
При естественном способе задания движения вектор  определяют по его проекциям на оси M
определяют по его проекциям на оси M  nb, имеющие начало в точке М и движущиеся вместе с нею (рис.5). Эти оси, называемые осями естественного трехгранника (или скоростными осями), направлены следующим образом: ось
nb, имеющие начало в точке М и движущиеся вместе с нею (рис.5). Эти оси, называемые осями естественного трехгранника (или скоростными осями), направлены следующим образом: ось  - вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось Мn - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось Mb - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль Мn, лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль Mb - бинормалью.
- вдоль касательной к траектории в сторону положительного отсчета расстояния s; ось Мn - по нормали, лежащей в соприкасающейся плоскости и направленной в сторону вогнутости траектории; ось Mb - перпендикулярно к первым двум так, чтобы она образовала с ними правую тройку. Нормаль Мn, лежащая в соприкасающейся плоскости(вплоскости самой кривой, если кривая плоская), называетсяглавной нормалью, а перпендикулярная к ней нормаль Mb - бинормалью.
Было показано, что ускорение точки лежит в соприкасающейся плоскости, т. е. в плоскости  ; следовательно, проекция вектора
; следовательно, проекция вектора  на бинормаль равна нулю (
на бинормаль равна нулю ( ).
).
Вычислим проекции , на две другие оси. Пусть в моментвремени t точка находится в положении М и имеет скоростьv, a в момент  приходит в положение М1 и имеет скорость v1.
приходит в положение М1 и имеет скорость v1.
 Тогда по определению
Тогда по определению
|
|
|
|
|
Дата добавления: 2014-12-17; Просмотров: 427; Нарушение авторских прав?; Мы поможем в написании вашей работы!