КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модальный цифровой регулятор для объекта первого порядка с запаздыванием
|
|
|
|
Модальные цифровые регулЯторы длЯ объектов с запаздыванием
Широкое развитие цифровых управляющих устройств, обладающих большими возможностями требует разработки новых, более эффективных алгоритмов дискретного управления технологическими объектами. Модальные цифровые алгоритмы управления реализуют наиболее совершенную структуру астатического регулятора состояния. Для компенсации запаздывания в эту структуру вводится упредитель выходных сигналов объекта управления. Использование теории модального цифрового управления позволяет существенно упростить расчет параметров астатического регулятора состояния.
Поставим задачу разработки методики расчета астатического модального регулятора с упредителем, обеспечивающую получение таких параметров настройки регулятора, которые дадут выбранное расположение корней характеристического уравнения замкнутой системы.
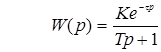
Рассмотрим наиболее общий случай, когда выбранный период квантования  не кратен величине запаздывания, а объект управления описывается передаточной функцией
не кратен величине запаздывания, а объект управления описывается передаточной функцией
 .
.
Тогда (см. раздел 3) цифровая модель объекта в координатах «вход  - выход
- выход  » будет иметь вид
» будет иметь вид
 (5.1)
(5.1)
где коэффициенты вычисляются согласно формулам (3.6).
В системе пространства состояний это уравнение выглядит так
 (5.2)
(5.2)
Для придания астатизма модальному регулятору добавим в уравнение объекта уравнение дискретного интегратора, а дополнительный запаздывающий сигнал управления  учтем в виде новой координаты состояния
учтем в виде новой координаты состояния  .
.
Тогда получим
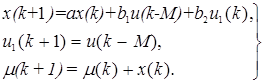 (5.3)
(5.3)
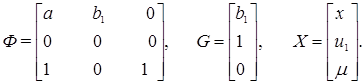
Запишем уравнения (5.3) в матричном виде
 (5.4)
(5.4)
где
Уравнение регулятора состояния с упредителем для объекта (5.4) имеет вид
 (5.5)
(5.5)
Таким образом необходимо решить две задачи:
1). Вычислить вектор обратных связей  для объекта без запаздывания.
для объекта без запаздывания.
2). Сформировать упрежденный вектор состояния  .
.
1). Вычисления вектора
Для вычисления вектора запишем уравнение замкнутой системы без
запаздывания 
 (5.6)
(5.6)
где матица замкнутой системы равна
 . (5.7)
. (5.7)
Запишем характеристическое уравнение запаздывающей системы:  , но потребуем, чтобы это уравнение имело заданное расположение корней. Причем для удобства расчета коэффициентов вектора обратных связей поместим все три корня в одну точку
, но потребуем, чтобы это уравнение имело заданное расположение корней. Причем для удобства расчета коэффициентов вектора обратных связей поместим все три корня в одну точку  . Тогда характеристический полином системы будет иметь вид
. Тогда характеристический полином системы будет иметь вид
 . (5.8)
. (5.8)
Это уравнение распадается на систему трех линейных алгебраических уравнений, получаемых путем сравнения коэффициентов при соответствующих степенях переменной  . Решая систему трех уравнений определим коэффициенты вектора обратных связей
. Решая систему трех уравнений определим коэффициенты вектора обратных связей 
 (5.9)
(5.9)
При выборе величины  следует иметь в виду, что при уменьшении его значения, быстродействие системы возрастает, но возрастает и амплитуда управляющего сигнала.
следует иметь в виду, что при уменьшении его значения, быстродействие системы возрастает, но возрастает и амплитуда управляющего сигнала.
2). Формирование упрежденного вектора состояния
Такое формирование осуществляется путем последовательного (для  ) нахождения выражений по уравнению (5.4)
) нахождения выражений по уравнению (5.4)
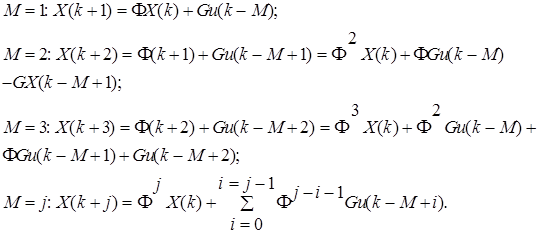
Тогда модальный закон управления с упредителем примет вид
 (5.10)
(5.10)
Раскрывая выражение (5.10) получим формулы для вычисления упрежденных сигналов
 (5.11)
(5.11)
где 
По полученным формулам работает блок упреждения, введенный в структуру модальной цифровой системы регулирования, показанной на рис 5.1.
В этой системе введен элемент сравнения, формирующий сигнал ошибки  , поступающий далее на блок упреждения. Сигнал
, поступающий далее на блок упреждения. Сигнал  можно получить минуя блок упреждения, путем пропускания сигнала управления через звено задержки
можно получить минуя блок упреждения, путем пропускания сигнала управления через звено задержки  на один период квантования.
на один период квантования.
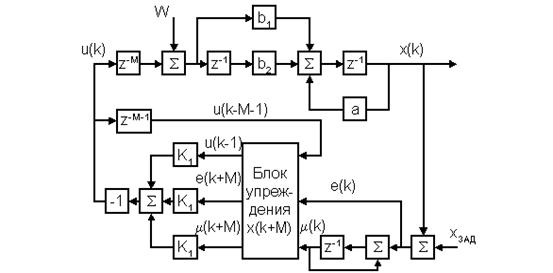
Рис. 5.1. Структура цифровой системы управления с упредителем.
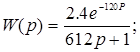
Пример расчета. Пусть передаточная функция объекта имеет вид
Часто для упрощения расчетов выбирают величину периода квантования, кратную запаздыванию. В этом случае коэффициент  и вектор состояния
и вектор состояния  становится двумерным. Примем
становится двумерным. Примем  с, тогда в цифровой модели объекта (5.2) величина
с, тогда в цифровой модели объекта (5.2) величина  . Для получения максимального быстродействия в замкнутой системе зададимся величиной кратного корня
. Для получения максимального быстродействия в замкнутой системе зададимся величиной кратного корня  . На рис. 5.2 приведена структурная схема модальной системы цифрового управления для этого случая. На схеме отсутствует явно выраженный блок упреждения, хотя при расчете коэффициентов схемы использовались формулы (5.11). Значения сигналов в системе при отработке единичного сигнала задания приведены в табл.5.1. Видно, что переходные процессы заканчиваются за 3 периода квантования, что и соответствует порядку системы. Отметим, что в реальных условиях модель объекта носит приближенный характер, что не позволяет задаваться нулевым значением величины кратного корня системы.
. На рис. 5.2 приведена структурная схема модальной системы цифрового управления для этого случая. На схеме отсутствует явно выраженный блок упреждения, хотя при расчете коэффициентов схемы использовались формулы (5.11). Значения сигналов в системе при отработке единичного сигнала задания приведены в табл.5.1. Видно, что переходные процессы заканчиваются за 3 периода квантования, что и соответствует порядку системы. Отметим, что в реальных условиях модель объекта носит приближенный характер, что не позволяет задаваться нулевым значением величины кратного корня системы.
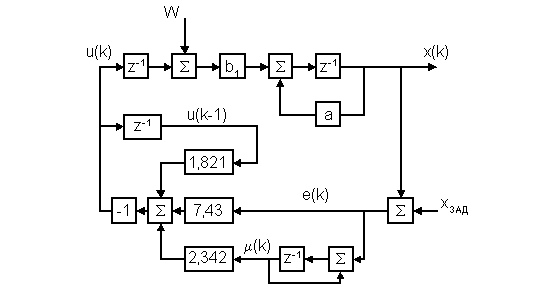
Рис. 5.2. Структурная схема цифровой системы управления
Таблица.5.1
| k | e(k) | u(k) | x(k+1) | m(k+1) |
| -1 | 7.43 | |||
| -1 | -3.758 | -1 | ||
| 2.173 | -4.168 | 3.173 | -2 | |
| 0.416 | 0.173 | |||
| 0.416 | 0.173 |
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1056; Нарушение авторских прав?; Мы поможем в написании вашей работы!