КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Постановка задачи синтеза оптимального регулятора
|
|
|
|
С целью применения метода пространства состояний и метода оптимального линейного управления перейдем от описания динамики объекта в терминах передаточной функции к описанию в пространстве состояний.
Структурная схема объекта первого порядка с запаздыванием в канале управления приведена на рис 4.1, где w(t) - сигнал внешнего возмущающего воздействия.
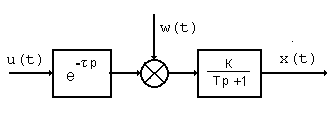
Рис. 4.1. Структурная схема объекта управления.
С целью придания астатических свойств замкнутой системе введем в структуру объекта управления интегральную составляющую оптимального регулятора (Рис.4.2)
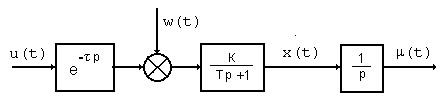
Рис. 4.2. Модифицированная структурная схема объекта управления с интегральной составляющей.
Будем осуществлять синтез регулятора, который оптимизирует только свободное движение объекта управления (т.е. движение, возникающее из-за ненулевых начальных условий). Поэтому в структурной схеме рис.4.2. возмущающий сигнал w(t) положим равным нулю.
Запишем соответствующие передаточные функции
 , (4.1)
, (4.1)
 . (4.2)
. (4.2)
Или
 , (4.3)
, (4.3)
 (4.4)
(4.4)
Переходя от операторных уравнений к дифференциальным получим

 ,
, 

 , (4.5)
, (4.5)
где  ,
,  - начальная функция звена запаздывания, описывающая предысторию движения объекта до момента включения в работу регулятора.
- начальная функция звена запаздывания, описывающая предысторию движения объекта до момента включения в работу регулятора.
Запишем систему уравнений (4.5) в нормальной форме Коши
 , ,
, ,
 , , (4.6)
, , (4.6)
где 
Таким образом мы получили описание модифицированного объекта управления в пространстве состояний. Запишем систему (4.6) в матричном виде
 ,
,
 , (4.7)
, (4.7)

где  ,
,
 ,
,  ,
,  .
.
В качестве критерия оптимизации применяют интегральный квадратичный критерий качества, обеспечивающий получение линейного оптимального закона управления
 (4.8)
(4.8)
Q и R это известные, выбираемые проектировщиком, матрицы штрафов на координаты векторов состояния и управления. Такая постановка задачи синтеза известна под названием аналитического конструирования регуляторов, основоположником которого является профессор Лётов А.М.
Предполагается, что все компоненты вектора состояния X(t) доступны для измерения. Кроме этого матрица штрафа  на коэффициенты вектора состояния должна быть положительно полуопределенная, т.е.
на коэффициенты вектора состояния должна быть положительно полуопределенная, т.е. . Условие положительной полуопределенности означает, что главный определитель и все миноры матрицы должны быть больше или равны нулю.
. Условие положительной полуопределенности означает, что главный определитель и все миноры матрицы должны быть больше или равны нулю.
Для упрощения структуры критерия качества матица должна иметь структуру
Матрица штрафа на координаты вектора управления  должна быть положительно определенная. Эти условия накладываются для того, чтобы задача синтеза была аналитически разрешима.
должна быть положительно определенная. Эти условия накладываются для того, чтобы задача синтеза была аналитически разрешима.
В нашем случае управление  - скаляр, поэтому R=r, r >0,
- скаляр, поэтому R=r, r >0,  ,
, . Критерий качества при этих условиях примет вид
. Критерий качества при этих условиях примет вид
 . (4.9)
. (4.9)
При выборе численных значений коэффициентов штрафа в простейшем случае можно задаться  и в этом случае варьируется только коэффициент штрафа r. Известно что при увеличении r, динамика системы становиться менее форсированной, переходные процессы затягиваются.
и в этом случае варьируется только коэффициент штрафа r. Известно что при увеличении r, динамика системы становиться менее форсированной, переходные процессы затягиваются.
Часто принимают  и варьируют только
и варьируют только  и
и  . При этом с увеличением коэффициента штрафа
. При этом с увеличением коэффициента штрафа  усиливается эффект действия пропорциональной составляющей оптимального регулятора, а с увеличением штрафа
усиливается эффект действия пропорциональной составляющей оптимального регулятора, а с увеличением штрафа  - интегральной составляющей.
- интегральной составляющей.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 742; Нарушение авторских прав?; Мы поможем в написании вашей работы!