КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
МЕХАНИЗМОВ 3 страница
|
|
|
|
Полный вектор силы  равен геометрической сумме нормальной и касательной его составляющих
равен геометрической сумме нормальной и касательной его составляющих
 (3.11)
(3.11)
Величина вектора:
 .
.
Для силы  необходимо определить точку ее приложения. Воспользуемся уравнением моментов для звена 3 относительно точки
необходимо определить точку ее приложения. Воспользуемся уравнением моментов для звена 3 относительно точки 
 . (3.12)
. (3.12)
Или

Так как для рассматриваемого примера все остальные силы проходят через точку , то и сила также проходит через эту точку и ее плечо  .
.
Для определения усилия во вращательной кинематической паре можно рассмотреть равновесие одного из звеньев – 2 или 3. Запишем условие равновесия сил, действующих на звено 3
 . (3.13)
. (3.13)
Или
 .
.
Неизвестный вектор силы  определим с помощью построенного многоугольника сил на рис. 3.2, б, соединив точки b и c:
определим с помощью построенного многоугольника сил на рис. 3.2, б, соединив точки b и c:

С помощью условия равновесия сил на звене 2 можно было определить усилие  , при этом очевидно, что
, при этом очевидно, что
 .
.
Рассмотрим равновесие начального звена 1 механизма (рис. 3.2, в). На это звено действует известная сила  во вращательной кинематической паре
во вращательной кинематической паре  :
:
 .
.
Требуется определить силу  в шарнире
в шарнире  и уравновешивающий момент
и уравновешивающий момент  .
.
Из уравнения моментов для звена 1 относительно точки определим уравновешивающий момент:
 . (3.14)
. (3.14)
Или
 .
.
Здесь  - действительная длина ведущего звена;
- действительная длина ведущего звена;  - угол между звеном 1 и перпендикуляром, опущенным на направление силы
- угол между звеном 1 и перпендикуляром, опущенным на направление силы  (берется из чертежа).
(берется из чертежа).
Направление неизвестного момента взято произвольным (у нас против часовой стрелки). Из уравнения определяется величина уравновешивающего момента
 (3.15)
(3.15)
Если из расчета значение будет со знаком “минус”, то направление уравновешивающего момента на рис.3.2, в следует сменить на противоположное.
Момент , совпадающий по направлению с положительной угловой скоростью  , будет положительным, а направленный против будет отрицательным.
, будет положительным, а направленный против будет отрицательным.
Для рассматриваемого примера

и является положительным.
Уравнение равновесия ведущего звена имеет вид
 . (3.16)
. (3.16)
Отсюда
 .
.
Таким образом

3.1.2. Определение уравновешивающего момента методом возможных перемещений
Согласно принципу возможных перемещений сумма элементарных работ всех сил и моментов, приложенных к системе, находящейся  в равновесии, на возможных перемещениях системы равна нулю
в равновесии, на возможных перемещениях системы равна нулю
 . (3.17)
. (3.17)
Для механизма возможными перемещениями звеньев и точек приложения сил будут их действительные перемещения, являющиеся функциями положения начального звена. Если приложить к звеньям механизма силы инерции, то можно рассматривать его в состоянии динамического равновесия.
Так как силы, действующие в кинематических парах, являются внутренними, то уравнение (3.17) позволяет найти величину уравновешивающего момента или уравновешивающей силы без их предварительного определения.
Записанное выше уравнение (3.17) неудобно для практического использования, поэтому возьмем сумму элементарных работ в единицу времени; тогда, принимая во внимание, что
 и
и  ,
,
получим
 . (3.18)
. (3.18)
Здесь суммирование проводится по всем  силам и
силам и  моментам сил всех звеньев механизма, а каждое слагаемое представляет собой мощность силы или момента.
моментам сил всех звеньев механизма, а каждое слагаемое представляет собой мощность силы или момента.
Так как скорости точек приложения сил и угловые скорости звеньев известны по величине и направлению из кинематического расчета, то единственным неизвестным является искомая величина уравновешивающего момента (или уравновешивающей силы).
Для рассматриваемого примера уравнение (3.18) запишется
 (3.19)
(3.19)
Значение уравновешивающего момента для расчетного положения будет:
Углы между направлениями векторов сил и скоростей можно взять из плана механизма (рис. 3.3).Так как направление приложенного уравновешивающего момента взято на схеме механизма произвольно, то при отрицательном значении его направление следует изменить на противоположное.
Рис.3.3. Схема механизма для определения уравновешивающего
момента
3.1.3. Определение уравновешивающего момента с помощью рычага Жуковского
Рычаг Жуковского является графической интерпретацией метода возможных перемещений.
Н.Е.Жуковский показал,что если векторы всех сил, приложенных к различным точкам звеньев механизма, перенести параллельно самим себе в одноименные точки повернутого на 90° плана скоростей, приняв фигуру плана за жесткий рычаг, то момент каждой силы относительно полюса плана скоростей будет пропорционален ее мощности, а сумма моментов всех указанных сил будет равна нулю. При этом все моменты, в том числе и уравновешивающий, должны быть заменены парами сил.
Пара сил  , заменяющая уравновешивающий момент, равна
, заменяющая уравновешивающий момент, равна
 . (3.20)
. (3.20)
Рычаг Жуковского, представлен на рис. 3.4, а. План скоростей повернут на 90° против часовой стрелки. Сила произвольно направлена вниз от точки а плана.
Рис.3.4. Рычаг Жуковского и схема первичного механизма.
Сумма моментов сил относительно полюса р рычага Жуковского имеет вид
 . (3.21)
. (3.21)
Или

Отсюда
 (3.22)
(3.22)
В этом выражении плечи сил определяются из рычага Жуковского путем их замера.
Как видно из формулы, величина силы  не зависит от масштаба построения рычага Жуковского.
не зависит от масштаба построения рычага Жуковского.
Численное значение силы от уравновешивающего момента для рассматриваемого примера будет

Знак «минус» указывает на противоположное принятому направление силы на рычаге Жуковского.
Для определения уравновешивающего момента необходимо полученную силу перенести параллельно самой себе из рычага Жуковского в точку первичного механизма (рис. 3.4, б), и тогда уравновешивающий момент будет положительным и иметь вид:
 .
.
Его величина для рассматриваемого примера

4. РАСЧЕТ НА ЭВМ
Программы кинематического и силового анализа КПМ составлены на языке ФОРТРАН для персонального компьютера типа РС. Ввиду большого объема программ текст их не приводится, а даются лишь пояснения по их использованию.
Значения всех параметров задаются в системе СИ: линейные параметры – в метрах, силы – в ньютонах, моменты сил – в ньютон-метрах, массы – в килограммах. Углы берутся в радианной мере.
Кинематические параметры звеньев, кинематических пар и характерных точек определяются в правой системе координат х, у, начало которой расположено в т.О и ось х направлена вдоль линии действия ползуна.
За положительное направление углов принято направление против часовой стрелки.
4.1 Кинематический и силовой анализ КПМ без учета сил трения, зависящих от сил, действующих в кинематических парах
4.1.1. Исходные данные
Массив исходных данных для ввода в компьютер по первому варианту расчета представлен в табл.4.1.
Таблица 4.1

| 
| 
| 
| 
| 
|
| 0,175 | 1,4 | -1 | 12,56 | 0,7 | |

| 
| 
| 
| 
| 
|
| 10,5 | 0,22 | ||||

| 
| 
| 
| 
| 
|
| 1,575 | 1,4 | 1,225 | |||
| N | KON | ||||
Здесь и  - длина звеньев 1и 2;
- длина звеньев 1и 2;
 - координаты дополнительной точки F, определяющей признак сборки КПМ. Координата
- координаты дополнительной точки F, определяющей признак сборки КПМ. Координата  для центрального механизма всегда равна нулю;
для центрального механизма всегда равна нулю;
- угловая скорость вращения кривошипа, определяется по заданной частоте вращения:

Параметр  определяет положение центра тяжести шатуна – точки
определяет положение центра тяжести шатуна – точки  ;
;
и  - массы звеньев 2 и 3;
- массы звеньев 2 и 3;
l  - длина ползуна.
- длина ползуна.
Значения коэффициентов горизонтальной и вертикальной перегрузок вводится с учетом их знака. Положительные значения этих коэффициентов соответствуют их направлению, совпадающему с положительными направлениями осей координат. При этом силы, возникающие от действия перегрузок, будут направлены в противоположную перегрузкам сторону.
 - постоянная составляющая силы трения, возникающая в уплотнениях при движении ползуна 3, взятая по модулю.
- постоянная составляющая силы трения, возникающая в уплотнениях при движении ползуна 3, взятая по модулю.
В третьей строке таблицы записываются попарно значения координат точки В, определяющие два крайних и среднее положения точки В ползуна, и соответствующие им значения силы сопротивления  для рабочего диапазона работы механизма. Все параметры в третьей строке задаются в виде абсолютных величин.
для рабочего диапазона работы механизма. Все параметры в третьей строке задаются в виде абсолютных величин.
Для положений механизма, не определяемых этими тремя точками, значения силы сопротивления для рабочего хода ползуна вычисляются в программе по методу параболической интерполяции.
Параметр N в табл. 4.1 определяет число расчетных точек для всего диапазона работы механизма. Назначим N=24 ( ). Тогда любое из восьми положений механизма, указанных на рис.1.1, совпадёт с одной из N точек, рассчитываемых по программе.
). Тогда любое из восьми положений механизма, указанных на рис.1.1, совпадёт с одной из N точек, рассчитываемых по программе.
Параметр KON – программный параметр. Он определяет признак конца вариантов исходных данных. KON=1, если данный вариант является последним среди нескольких вариантов исходных данных либо единственным. В противном случае KON=0.
В табл.4.1 представлены конкретные значения всех перечисленных параметров для рассматриваемого примера.
4.1.2. Результаты расчета
Программа для кинематического и силового расчетов КПМ без учета сил трения, зависящих от усилий в кинематических парах, имеет шифр AN2.
Образец распечатки результатов расчета на ПК по программе AN2 приведен в приложении 1.
В первых трёх строчках распечатаны значения параметров таблицы исходных данных за исключением N и KON. Печать исходных данных позволяет контролировать их правильный ввод в машину.
Далее следуют значения углов поворота кривошипа для расчетных точек и соответствующие им массивы выводимых параметров, распечатанные в четырех строчках:
| строка 1 | 
| 
| 
| 
| 
| 
|
| строка 2 | 
| 
| 
| 
| 
| 
|
| строка 3 | 
| 
| 
| 
| 
| 
|
| строка 4 | 
| 
| 
| 
| 
| 
|
Угол поворота кривошипа для каждой расчетной точки определяется как
 (4.1)
(4.1)
При числе расчетных точек N число массивов в распечатке равно N+2. Это связано с тем, что два крайних положения ползуна рассчитаются дважды – для рабочего и холостого его ходов.
4.1.3. Кинематический анализ.
Аналитическим методом с использованием векторов, связанных со звеньями механизма (см.рис.2.1), рассчитываются кинематические характеристики звеньев механизма и точки для всего диапазона его работы.
Если направления векторов будут противоположны принятым на рис.2.1, то это необходимо будет учесть при сравнении полученных значений углов со значениями, приведенными на распечатке.
На рис.4.1 представлены кинематические характеристики звеньев 2 и 3,построенные в функции положения начального звена  .
.
4.1.4. Определение силовых характеристик
При расчете с помощью ПК получаются значения усилий во всех кинематических парах в проекциях на оси координат х и у и уравновешивающий момент на ведущем звене во всем диапазоне его работы (см. образец распечатки в приложении 1).
Кроме того, для всех расчетных точек в распечатке дается суммарное значение сил сопротивления  и трения , приложенных к ползуну 3.
и трения , приложенных к ползуну 3.
На рис.4.2 приведена схема механизма в расчетном положении с обозначением сил и моментов, приложенных к звеньям механизма, а также сил, действующих в кинематических парах. Здесь усилие в поступательной кинематической паре  представлено в виде двух составляющих
представлено в виде двух составляющих  и
и  ,приложенных по краям ползуна, которые разложены на горизонтальные и вертикальные составляющие. Таким образом, на первом этапе силового расчета полное усилие равно
,приложенных по краям ползуна, которые разложены на горизонтальные и вертикальные составляющие. Таким образом, на первом этапе силового расчета полное усилие равно
т.к.  (4.2)
(4.2)
а поскольку плечо силы  , то очевидно, что
, то очевидно, что
 (4.3)
(4.3)
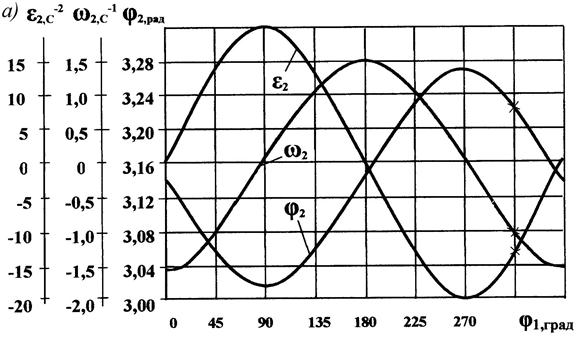
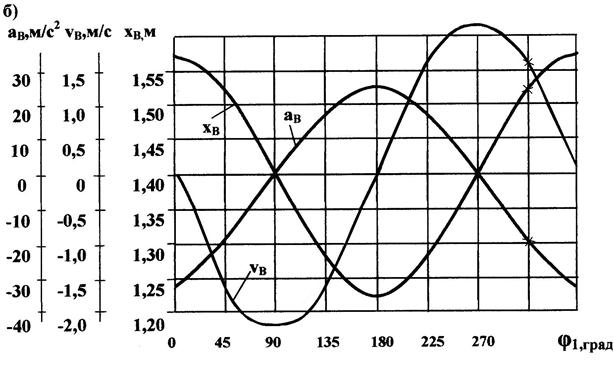
Рис.4.1. Кинематические характеристики звеньев 2 и 3

Рис.4.2. Схема механизма с приложенными силами
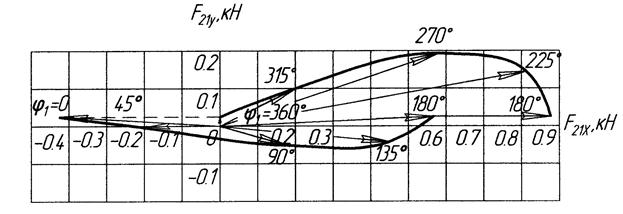
Рис.4.3. Годограф силы 
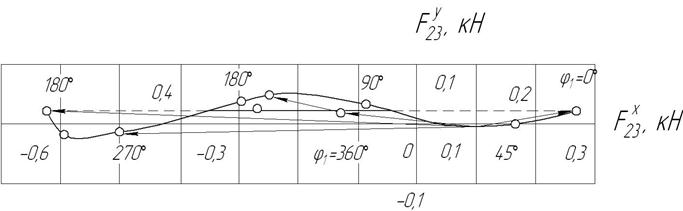
Рис.4.4. Годограф силы 
Силовые характеристики, построенные по результатам распечатки, представлены на рис.4.3- 4.5. На рис.4.3, 4.4 показаны годографы сил  ,
,  , действующих в кинематических парах А и В на звене 2. годографы сил показывают изменение величины и направления вектора силы в зависимости от положения механизма. При построении годографов сил масштабы вертикальной и горизонтальной составляющих сил должны быть одинаковыми, и отсчет двух составляющих должен идти от нулевого значения. В противном случае действительное направление вектора силы будет потеряно. На годографах сил указаны значения углов , которым соответствуют точки годографа.
, действующих в кинематических парах А и В на звене 2. годографы сил показывают изменение величины и направления вектора силы в зависимости от положения механизма. При построении годографов сил масштабы вертикальной и горизонтальной составляющих сил должны быть одинаковыми, и отсчет двух составляющих должен идти от нулевого значения. В противном случае действительное направление вектора силы будет потеряно. На годографах сил указаны значения углов , которым соответствуют точки годографа.
На годографах для углов  и
и  наблюдаются скачки сил. Они связаны со скачкообразным изменением сил трения и сопротивления при изменении направления движения ползуна.
наблюдаются скачки сил. Они связаны со скачкообразным изменением сил трения и сопротивления при изменении направления движения ползуна.
На рис.4.5 представлены зависимости уравновешивающего момента и полной силы реакции от угла поворота ведущего звена.
При построении графика  следует учесть, что
следует учесть, что
 .
.
Сравнение результатов, полученных на ПК, со значениями кинематических и силовых параметров для расчетной точки рассматриваемого примера дает ошибку в пределах заданной нормы.
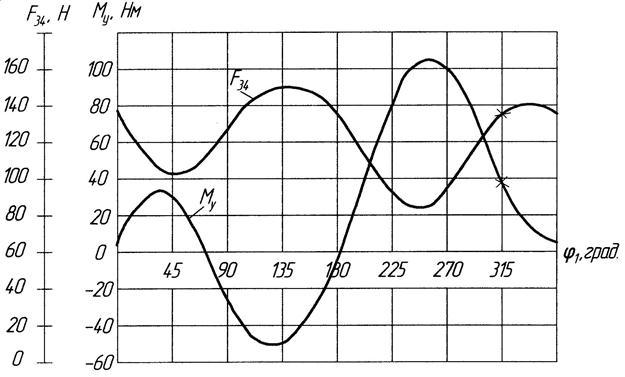
Рис. 4.5. График уравновешивающего момента Му и силы
4.2. Силовой анализ с учетом трения, зависящего от сил в кинематических парах
Программа кинематического и силового расчета КПМ с учетом трения в кинематических парах имеет шифр А2Т. Этот вариант программы позволяет:
1) провести силовой расчет КПМ с учетом трения, зависящего от сил в кинематических парах;
2) расположить КПМ как горизонтально, так и вертикально (например, КПМ долбежного станка) (рис.4.7);
3) перенести параллельно оси у точки приложения силы сопротивления (рис.4.7).
4.2.1. Методика расчета
Наличие трения изменяет величину и направление действующих сил в кинематических парах, как во вращательных, так и в поступательных.
Трение во вращательной кинематической паре V класса звеньев i, j учитывается в виде момента трения, приложенного к звену i со стороны звена j:
 , (4.4)
, (4.4)
где  - постоянная величина момента сил трения; r- радиус цапфы; f- коэффициент трения в цапфе;
- постоянная величина момента сил трения; r- радиус цапфы; f- коэффициент трения в цапфе;  - модуль силы, действующей в кинематической паре на звено i со стороны звена j;
- модуль силы, действующей в кинематической паре на звено i со стороны звена j;  - относительная угловая скорость звена i.
- относительная угловая скорость звена i.
Трение в поступательной кинематической паре V класса звеньев i, j определяется как
 (4.5)
(4.5)
где  - постоянная величина силы трения;
- постоянная величина силы трения;  - коэффициент трения в поступательной паре;
- коэффициент трения в поступательной паре;  - модуль нормальной составляющей силы реакции в поступательной паре на звене i, полученный из расчета без учета сил трения;
- модуль нормальной составляющей силы реакции в поступательной паре на звене i, полученный из расчета без учета сил трения;  - относительная линейная скорость звена i.
- относительная линейная скорость звена i.
Если пренебречь постоянными составляющими сил и моментов сил трения, то получим формулы
 (4.6)
(4.6)
 (4.7)
(4.7)
Силовой расчет рычажных механизмов с учетом трения проводят методом итераций (последовательных приближений).
В первой итерации определяются неизвестные силы в кинематических парах при условии равенства нулю сил и моментов сил трения, зависящих от сил в парах.
Во второй итерации определяются силы и моменты сил трения в зависимости от сил, действующих во всех кинематических прах, и кинетостатический расчет проводится в том же порядке, но с учетом дополнительно приложенных сил и моментов сил трения.
Следующие итерации аналогичны второй. Опыт показывает, что уже второе приближение дает хорошие результаты.
На рис.4.6 представлена схема КПМ со всеми действующими на звеньях механизма силами реакции и силами и моментами сил трения. Остальные силы на схеме не показаны.
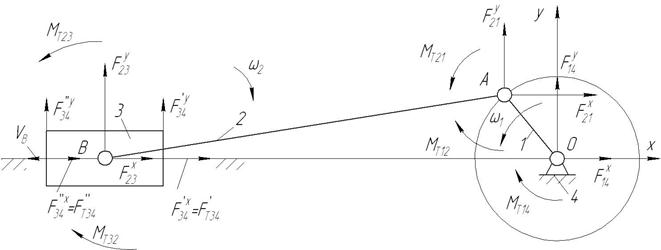
Рис. 4.6. Схема механизма с учетом трения в кинематических парах
Здесь силы и моменты сил трения определяются в соответствии с формулами (4.6) и (4.7).
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 615; Нарушение авторских прав?; Мы поможем в написании вашей работы!