КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
МЕХАНИЗМОВ 1 страница
|
|
|
|
АНАЛИЗ КРИВОШИПНО-ПОЛЗУННЫХ
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ
Учебное пособие для
выполнения курсового проекта
(работы) по курсу
«Теория механизмов и машин»
Казань 2008
ОГЛАВЛЕНИЕ
Введение………………………………………………………………..…….….3
1. Кинематический синтез механизма и определение
характерных точек положения ползуна………………………….…………..….5
2. Кинематический анализ механизма…………………...………….…….6
2.1 Аналитический метод расчета…………………………………….……6
2.2 Графоаналитический метод определения кинематических
параметров……………………………………………….……………………….10
2.2.1. Определение положений …………………………………………....10
2.2.2. Определение скоростей……………………………………………...11
2.2.3. Определение ускорений……………………………………………..14
3. Силовой анализ механизма……………………………………………...16
3.1 Силовой анализ без учёта сил трения, зависящих
от сил, действующих в кинематических парах…………………………….….17
3.1.1 Графоаналитический метод силового анализа механизма.………..17
3.1.2 Определение уравновешивающего момента
методом возможных перемещений………………………………………….....24
3.1.3 Определение уравновешивающего момента с помощью
рычага Жуковского……………………………………………………………...25
4. Расчёт на ЭВМ…………………………………………………………...27
4.1. Кинематический и силовой анализ КПМ без учета сил
трения, зависящих от сил, действующих кинематических парах…………....28
4.1.1. Исходные данные……………………………………………………28
4.1.2. Результаты расчёта……………………………………………….….29
4.1.3. Кинематический анализ……………………………………….….....30
4.1.4. Определение силовых характеристик……………………………...30
4.2. Силовой анализ с учётом трения, зависящего от сил
в кинематических парах………………………………………………………...33
4.2.1. Методика расчёта…………………………………………………....34
4.2.2. Расчёт на ПК по программе А2Т…………………………………...37
5. Оформление курсовой работы……………………………………….…40
Заключение………………………………………………………………………40
Приложения………………………………………………………………….…..41
Список литературы………………………………………………………...……44
В В Е Д Е Н И Е
Задачи, которые должны быть решены при проектировании, определяются техническим заданием с прилагаемыми к нему техническими условиями, определяющими необходимые параметры, которые должны быть выдержаны при проектировании.
В курсовом проекте (работе) технические условия даются в задании, выдаваемом студенту. Ниже приводятся техническое задание на выполнение работы и технические условия в виде образца задания.
Техническое задание
1. Выполнить кинематический синтез схемы центрального кривошипно- ползунного механизма (КПМ) по заданным техническим условиям, включающим структурную схему механизма, и определить координаты характерных точек положения ползуна.
2. Провести кинематический анализ полученной схемы аналитическим и графоаналитическим методами.
3. Провести силовой анализ полученной схемы без учета составляющих сил трения, зависящих от величины усилий, действующих в кинематических парах, аналитическим и графоаналитическим методами.
4. Определить величину уравновешивающего момента с использованием принципа возможных перемещений аналитическим и графоаналитическим методами.
Кинематический и силовой анализ полученной схемы КПМ может быть проведен с использованием персонального компьютера (ПК) типа РС. Расчеты на ПК проводятся по готовым программам, составленным на алгоритмическом языке ФОРТРАН. В пособии даны указания по вводу исходных данных и расшифровки результатов расчета. В данном пособии силовой анализ КПМ с использованием ПК изложен в двух вариантах. В первом учитываются лишь постоянные составляющие сил трения, а во втором варианте – и силы трения, зависящие от усилий, действующих в кинематических парах.
При использовании ПК техническое задание дополняется следующими требованиями.
1. Построить годографы сил, действующих в кинематических парах, с учетом составляющих сил трения, зависящих от действующих в них усилий.
2. Построить графики законов движения 2-го и 3-го звеньев механизма в функции угла поворота начального звена.
3. Построить график уравновешивающего момента и сил, действующих в поступательной паре.
Образец задания
Механизм на рис. В1 представляет собой центральный КПМ, преобразующий вращательное движение кривошипа 1 в возвратно-поступательное движение ползуна 3.
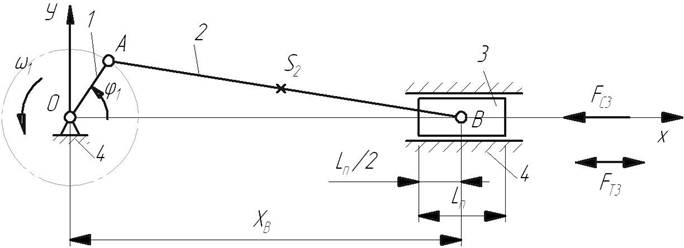
Рис. В1. Схема кривошипно-ползунного механизма
Механизм имеет следующие исходные данные:
1. Ход поршня  =0,35 м.
=0,35 м.
2. Длина поршня  =0,22 м.
=0,22 м.
3. Длина шатуна АВ  =1,4 м.
=1,4 м.  .
.
4. Частота вращения кривошипа  =120 об/мин.
=120 об/мин.
5. Масса шатуна  =7 кг.
=7 кг.
6. Масса поршня  =10,5 кг.
=10,5 кг.
7. Перегрузка горизонтальная  =1,0.
=1,0.
8. Постоянная сила трения в уплотнениях при движении поршня  =60 Н.
=60 Н.
9. Сила сопротивления, действующая на поршень:
при  300 Н.
300 Н.
при  300 Н.
300 Н.
при  300 Н.
300 Н.
10. Радиус цапфы r =0.02 м.
11. Коэффициент трения в цапфе f=0,25.
12. Коэффициент трения в поступательной кинематической паре  =0,2.
=0,2.
1.КИНЕМАТИЧЕСКИЙ СИНТЕЗ МЕХАНИЗМА И ОПРЕДЕЛЕНИЕ ХАРАКТЕРНЫХ ТОЧЕК ПОЛОЖЕНИЯ ПОЛЗУНА
По известным данным – ходу поршня и длине шатуна - необходимо определить длину кривошипа  , а также координаты двух крайних и среднего положений поршня , , .
, а также координаты двух крайних и среднего положений поршня , , .
Очевидно, что:
 ; (1.1)
; (1.1)
 (1.2)
(1.2)
 (1.3)
(1.3)
 . (1.4)
. (1.4)
Для заданного механизма искомые значения параметров будут следующими:
= 0,35/2 = 0,175 м;
= (0,175 + 1,4) = 1,575 м;
= (1,4 – 0,175) = 1,225 м;
= 1,4 м.
На рис. 1.1 представлена в масштабе схема механизма в восьми положениях через  изменения угла
изменения угла  .На схеме показаны траектории движения точек А, В,
.На схеме показаны траектории движения точек А, В,  , где - центр тяжести звена 2.
, где - центр тяжести звена 2.
За начальное положение механизма принято положение, при котором кривошип расположен вдоль положительной полуоси  , т.е. =0.
, т.е. =0.
На рис. 1.1 указана дополнительная точка F, расположенная на оси  , с помощью которой задается признак сборки механизма. Координата
, с помощью которой задается признак сборки механизма. Координата  =+1, если ползун слева от точки О кривошипа, и соответственно = -1 при правом расположении ползуна относительно кривошипа.
=+1, если ползун слева от точки О кривошипа, и соответственно = -1 при правом расположении ползуна относительно кривошипа.
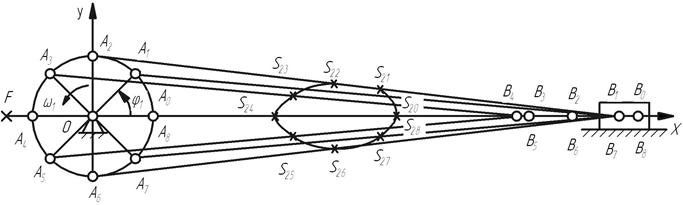
Рис. 1.1. Схема механизма в восьми положениях
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Структурный анализ КПМ по Ассуру позволяет представить механизм в виде совокупности первичного механизма (ведущее звено 1 и стойка 4) и двухповодковой группы (звенья 2 и 3). Кинематический и силовой анализ механизма проводят в соответствии с его структурным составом.
Кинематический анализ КПМ может быть выполнен либо аналитическим, либо графоаналитическим методом.
Аналитическим методом для одного расчетного положения механизма определяются положения, скорости и ускорения звеньев 2 и 3, а также точки .
Графоаналитическим методом для того же расчетного положения механизма определяются его кинематические параметры с помощью планов положений механизма, скоростей и ускорений.
Кинематические параметры, полученные двумя способами, не должны отличаться друг от друга более чем на (5…10)%.
Расчетное положение механизма следует выбирать из рабочего диапазона его работы. Рабочий ход ползуна определяется движением его в направлении от точки О, то есть для сборки механизма, определяемой как  = -1, рабочий ход соответствует диапазону перемещения ведущего звена от 180° до 360°, а для сборки =+1 рабочий ход ползуна определяется диапазоном угла от 0 до180°. Таким образом, расчетным положениям механизма соответствуют углы =
= -1, рабочий ход соответствует диапазону перемещения ведущего звена от 180° до 360°, а для сборки =+1 рабочий ход ползуна определяется диапазоном угла от 0 до180°. Таким образом, расчетным положениям механизма соответствуют углы =  и =
и =  для = -1 и углы = и =
для = -1 и углы = и =  для =+1.
для =+1.
2.1.Аналитический метод расчета
Схема механизма в масштабе в расчетном положении ( =315°) представлена на рис. 2.1, а.
Из технического задания известны: длины звеньев  , угловая скорость начального звена ω1=const, расположение центра тяжести звена2–точки .
, угловая скорость начального звена ω1=const, расположение центра тяжести звена2–точки .
Необходимо определить кинематические параметры звеньев 2 и 3 в функции положения ведущего звена  а также закон движения точки
а также закон движения точки  :
: 
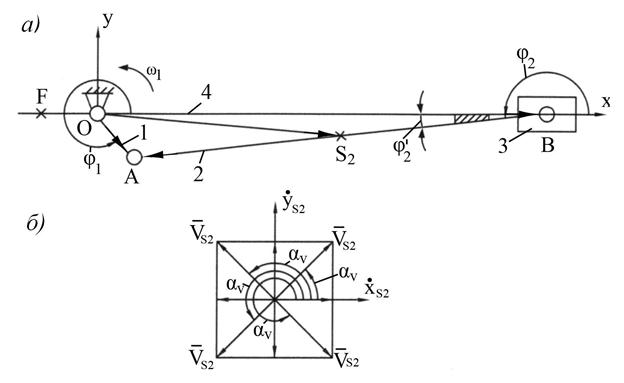
Рис. 2.1. Схема механизма в расчетном положении и определение положения
вектора скорости
Для решения задачи воспользуемся методом замкнутых векторных контуров.
Для этого вдоль каждого звена, составляющего замкнутый контур, направляется вектор. Его угловое положение определяется углом, положительное направление которого отсчитывается в направлении против часовой стрелки от положительной полуоси абсцисс.
На рис. 2.1, а показаны направления векторов треугольника ОВА.
Векторное уравнение замкнутого треугольника имеет вид
 (2.1)
(2.1)
Спроектируем векторное уравнение на оси координат х и у
 (2.2)
(2.2)
Из второго уравнения можно определить угол  . Для принятых расчетных положений механизма он будет
. Для принятых расчетных положений механизма он будет
 при
при 
 при
при  (2.3) где
(2.3) где  - острый угол, определяемый из треугольника ОАВ:
- острый угол, определяемый из треугольника ОАВ:
 ; (2.4)
; (2.4)
Из первого уравнения системы определяется координата точки В
 (2.5)
(2.5)
Для определения скоростей звеньев 2 и 3 продифференцируем систему двух уравнений по времени
 (2.6)
(2.6)
Или с учетом равенств


 , где
, где  ,
,
будем иметь систему
 (2.7)
(2.7)
Из второго уравнения системы уравнений получим выражение для  , а из первого – для
, а из первого – для  :
:
 (2.8)
(2.8)
 (2.9)
(2.9)
Повторное дифференцирование системы уравнений позволяет получить выражения для ускорений звеньев 2 и 3. С учетом равенств



эти выражения имеют вид
 (2.10)
(2.10)
 (2.11)
(2.11)
Численные значения кинематических параметров для расчетного положения заданного механизма будут следующими:
 ;
;
=  + =
+ =  .
.
В радианной мере
 рад;
рад;
 м;
м;
 1/с;
1/с;
 1/с;
1/с;


 м/с;
м/с;

 ;
;

 .
.
Для определения закона движения центра тяжести звена 2 – точки составим новый замкнутый векторный контур  (рис. 2.1). Векторное уравнение его имеет вид:
(рис. 2.1). Векторное уравнение его имеет вид:
 (2.12)
(2.12)
Проектируя уравнение на оси координат, получим координаты точки S2
 (2.13)
(2.13)
Первая и вторая производные от  и
и  по времени дадут значения составляющих скорости и ускорения точки
по времени дадут значения составляющих скорости и ускорения точки
 (2.14)
(2.14)
 (2.15)
(2.15)
 (2.16)
(2.16)
 (2.17)
(2.17)
Значения полных векторов скорости и ускорения точки будут
 (2.18)
(2.18)
 (2.19)
(2.19)
Положение вектора скорости относительно оси  определяется углом αV (рис. 2.1,б):
определяется углом αV (рис. 2.1,б):
 при
при  (2.20)
(2.20)
 при
при 
Аналогично определяется положение вектора ускорения:
 при
при  (2.21)
(2.21)
 при
при 
Подстановка в полученные выражения численных значений параметров заданного примера дает следующее результаты:
 м;
м;
 м;
м;
 м/с;
м/с;
 м/с;
м/с;
 ;
;
 ;
;
 м/с;
м/с;
 ;
;
 ;
;
 .
.
2.2.Графоаналитический метод определения кинематических параметров
Графические методы кинематического исследования механизмов обладают наглядностью, удобством контроля.
Графоаналитический метод определения кинематических параметров механизмов сводится к построению планов их положений, скоростей и ускорений.
2.2.1. Определение положений
План положений механизма – это графическое изображение взаимного расположения звеньев, соответствующее выбранному расчетному положению начального звена.
План положений механизма для угла = показан на рис. 2.1. Масштабный коэффициент плана положений  определяется как
определяется как
 (2.22)
(2.22)
где  - действительная длина звена 1;
- действительная длина звена 1;  - длина отрезка, изображающего звено 1 на плане положений.
- длина отрезка, изображающего звено 1 на плане положений.
Тогда отрезок  , соответствующий длине звена 2, будет
, соответствующий длине звена 2, будет
 (2.23)
(2.23)
План положений позволяет определить угол и координаты точек  и :
и :
 (2.24)
(2.24)
Для рассматриваемого примера численные значения приведенных параметров будут следующие:
 м/мм;
м/мм;
 мм;
мм;
 ;
;  м;
м;  м;
м;  м.
м.
Значения  ,
,  ,
,  ,
,  с большой степенью точности приближены к значениям, полученным аналитическим способом.
с большой степенью точности приближены к значениям, полученным аналитическим способом.
2.2.2. Определение скоростей
Метод основан на графическом решении векторных уравнений движения. Для построения плана скоростей должна быть известна кинематическая схема механизма, построенная в масштабе (рис. 2.2, а), и задан закон движения начального звена (например,  ).
).
Требуется найти линейные скорости точек  , и , а также угловую скорость звена 2.
, и , а также угловую скорость звена 2.
Построение плана скоростей начинается с определения скорости точки кривошипа
 (2.25)
(2.25)
Вектор скорости точки направлен перпендикулярно кривошипу  в направлении его вращения.
в направлении его вращения.
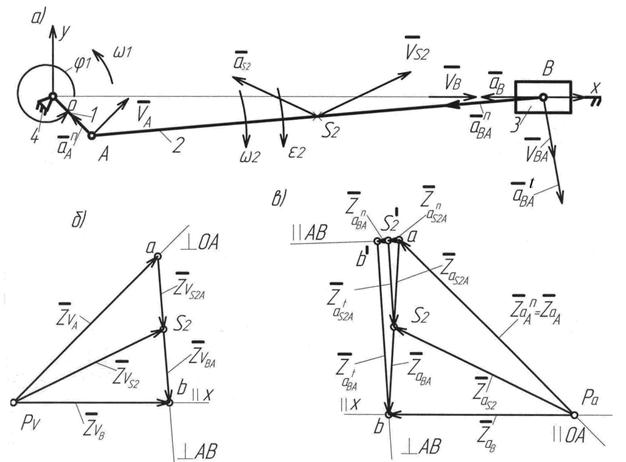
Рис.2.2. Схема механизма, планы скоростей и ускорений
Скорость точки , принадлежащей звену 2, можно представить как векторную сумму скоростей переносного  и относительного
и относительного  движений
движений
 (2.26)
(2.26)
Переносным движением звена 2 является поступательное движение его со скоростью точки

а относительным – вращательное движение звена 2 вокруг точки А. Если обозначить относительную скорость через  , то
, то

Окончательно векторное уравнение для скорости точки В будет иметь вид
 (2.27)
(2.27)
В этом уравнении векторы скоростей, известные по величине и направлению, подчеркнуты двумя чертами, а известные лишь по направлению – одной чертой.
Для определения указанных неизвестных величин строим план скоростей с выбранным масштабным коэффициентом 
 (2.28)
(2.28)
Здесь
 - длина отрезка, изображающего на плане скорость
- длина отрезка, изображающего на плане скорость  .
.
Из произвольной точки полюса плана скоростей  (рис. 2.2, б) проведем вектор , перпендикулярный кривошипу ОА, соответствующий на плане скоростей абсолютной скорости
(рис. 2.2, б) проведем вектор , перпендикулярный кривошипу ОА, соответствующий на плане скоростей абсолютной скорости  . Из конца вектора (точка а) проводим линию в направлении относительной скорости
. Из конца вектора (точка а) проводим линию в направлении относительной скорости  , перпендикулярную
, перпендикулярную  , а из полюса - линию в направлении скорости
, а из полюса - линию в направлении скорости  , параллельную
, параллельную  . В пересечении указанных линий находим точку b. Вектор
. В пересечении указанных линий находим точку b. Вектор  изображает скорость точки В, а вектор
изображает скорость точки В, а вектор  - скорость . Величины действительных скоростей определяют по формулам
- скорость . Величины действительных скоростей определяют по формулам
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 949; Нарушение авторских прав?; Мы поможем в написании вашей работы!