КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
К недостаткам передачи следует отнести повышенный износ резьбы, низкий к.п.д., наличие люфтов
|
|
|
|
Достоинством данной передачи по сравнению с рычажными механизмами являются простота конструкции и изготовления, компактность при высокой нагрузочной способности, высокая надежность, плавность и бесшумность, возможность обеспечения медленных перемещений с большой точностью, значительный выигрыш в силе.
В целях возможности регулирования механизмов, что особенно важно для машин с большим числом исполнительных механизмов, ряд звеньев рычажных механизмов следует конструировать так, чтобы было возможно в процессе монтажа и эксплуатации изменять их длины.
Данная методика проектирования шестизвенных рычажных механизмов с остановками применима, когда не требуется точное определение размеров звеньев механизма. Для получения более точных результатов применяются геометрические и аналитические методы, излагаемые в теории механизмов и машин.
Эти данные являются исходными при проектировании рычажных механизмов с остановками и ими задаются, исходя из циклограммы автомата и выполняемой механизмом технологической операции.
Для механизма с одной остановкой в крайнем положении время (в секундах) одного оборота кривошипа ОА  . Число оборотов кривошипа в минуту
. Число оборотов кривошипа в минуту  Углы поворота кривошипа, соответствующие времени рабочего хода
Углы поворота кривошипа, соответствующие времени рабочего хода  , холостого хода
, холостого хода  и остановки
и остановки  равны
равны  .
.
Остановка коромысла FE может иметь место после холостого хода или после рабочего хода.
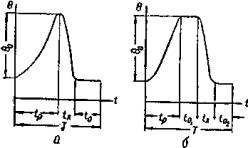
Рис. 11.21 Графики изменения угла поворота ведомого звена с одной (а) и двумя остановками (б).
1 случай - остановка происходит после холостого хода. Размеры звеньев основного четырехзвенника ОАВС (рис. 11.22) определяются подбором с учетом конструктивных условий размещения проектируемого механизма в автомате и обеспечения возможности поворота кривошипа ОА на 360°.
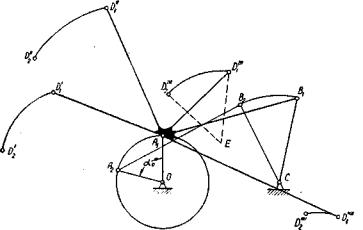
Рис. 11.22 Подбор шатунных кривых при проектировании шестизвенного механизма с одной остановкой движения ведомого звена
В соответствии с циклограммой автомата на схеме проектируемого механизма откладывается угол  и отмечаются крайние положения кривошипа OA 1 и ОА 2 и коромысла CB 1 и СВ 2, соответствующие началу и концу остановки коромысла FE.
и отмечаются крайние положения кривошипа OA 1 и ОА 2 и коромысла CB 1 и СВ 2, соответствующие началу и концу остановки коромысла FE.
Связывая неподвижно с шатуном АВ ряд точек плоскости движения шатуна D 1', D1', D 1''',..., вычерчиваются траектории этих точек за время перемещения кривошипа из положения ОА 1 в положение OA 2. Для этого практически удобно нанести на кальку шатун АВ и выбранные точки D 1', D 1'', D 1''',... и, перемещая кальку так, чтобы точка A двигалась по дуге A 1 A 2, а точка B – по дуге B 1 B 2, накалывать иглой последовательные положения точек D 1', D 1'', D 1''',... на чертеже.
Из вычерченных траекторий точек D 1', D 1'', D 1''',... необходимо найти подходящую траекторию, представляющую собой дугу окружности. Если это не удастся, то необходимо изменить размеры четырехзвенника ОАВС и построение повторить.
Пусть подходящей будет траектория точки D '''.
Находится радиус окружности ED и отмечается на чертеже положение точки Е. Для определения положения центра F и длины коромысла FE (рис.11.23) вычерчивается полная траектория точки D ''' и отмечаются на ней точки D 1, D 2, D 3 так, чтобы дуга D 1 D 2 соответствовала остановке, дуга D 2 D 3 – рабочему ходу и дуга D 3 D 1 – холостому.
При прохождении точкой D дуги D 2 D 3, коромысло FE должно повернуться на заданный угол размаха  , переместившись из одного крайнего положения в другое (рабочий ход), а затем, при прохождении точкой D дуги D 3 D 1, повернуться на тот же угол в обратном направлении (холостой ход). Для того, чтобы звено FE находилось в крайнем положении необходимо, чтобы направление звена ED совпадало с направлением нормали nn к траектории точки D в точке D 3. Построив эту нормаль и отложив по ее направлению длину звена ED, находится точка E 3, в которой будет центр шарнира E в крайнем положении E 3 D 3 звена ЕD, соответствующем началу холостого хода. Другое крайнее положение E 1 D 1 звена ED соответствует концу холостого хода (началу остановки).
, переместившись из одного крайнего положения в другое (рабочий ход), а затем, при прохождении точкой D дуги D 3 D 1, повернуться на тот же угол в обратном направлении (холостой ход). Для того, чтобы звено FE находилось в крайнем положении необходимо, чтобы направление звена ED совпадало с направлением нормали nn к траектории точки D в точке D 3. Построив эту нормаль и отложив по ее направлению длину звена ED, находится точка E 3, в которой будет центр шарнира E в крайнем положении E 3 D 3 звена ЕD, соответствующем началу холостого хода. Другое крайнее положение E 1 D 1 звена ED соответствует концу холостого хода (началу остановки).
После соединения точек Е 1 и Е 3 прямой из равнобедренного треугольника E 1 FЕ 3 определяется длина звена FE по формуле  . Положение центра шарнира F определится в пересечении засечек радиусом FE из точек Е 1 и Е 3.
. Положение центра шарнира F определится в пересечении засечек радиусом FE из точек Е 1 и Е 3.
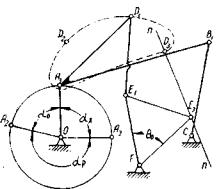
Рис. 11.23 Определение размеров шестизвенного механизма с одной остановкой движения ведомого звена
Аналогичным образом проектируется кинематическая схема шестизвенного рычажного механизма с двумя остановками коромысла FE. Для этого нужно найти такую точку D, неподвижно связанную с шатуном АВ, траектория которой имеет два участка, приближенно совпадающие с дугами окружности, причем время движения точки D по этим участка должно быть равно времени остановок  и
и  .
.
Спроектированный шестизвенный рычажный механизм с остановками необходимо проверить в отношении значений углов передачи движения  ,
,  ,
,  (рис. 11.24). Во всех положениях механизма эти углы не должны быть чрезмерно малы или велики. Обычно считают достаточным, чтобы углы передачи движения были в пределах от 40 до 140°.
(рис. 11.24). Во всех положениях механизма эти углы не должны быть чрезмерно малы или велики. Обычно считают достаточным, чтобы углы передачи движения были в пределах от 40 до 140°.
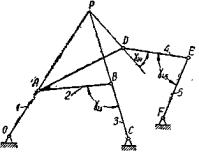
Рис. 11.24 Углы передачи движения в шестизвенном механизме
При проектировании рычажных механизмов с остановками целесообразно объединять несколько исполнительных механизмов в один за счет присоединения к одному исходному шарнирному четырехзвеннику ОABC нескольких групп ведомых звеньев 4 и 5 (рис. 11.24). Это позволяет значительно уменьшить среднее число звеньев, приходящееся на один исполнительный механизм. Так, если объединить два исполнительных механизма на базе одного исходного шарнирного четырехзвенника, то общее число звеньев механизмов будет равно восьми, а среднее число звеньев на один исполнительный механизм равно четырем, при объединении четырех исполнительных механизмов – среднее число звеньев равно трем.
§ Мальтийские механизмы
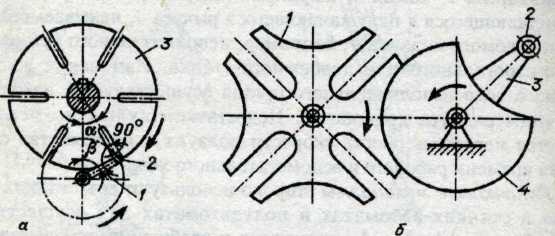
Проектирование мальтийских механизмов. Мальтийский механизм, схема которого приведена на рис. 11.25, состоит из вращающегося с постоянной угловой скоростью поводка 1 и неравномерно вращающегося с периодическими остановками мальтийского креста 2.
|
Рис. 11.25 Схема мальтийского механизма
1 – поводок, 2 – палец, 3 – крест, 4 - сегмент
а – крест с шестью пазами, б – крест с четырьмя пазами и фиксирующим сегментом
Пусть:  – число пазов мальтийского креста;
– число пазов мальтийского креста;  – радиус поводка;
– радиус поводка;  – радиус креста;
– радиус креста;  – межцентровое расстояние;
– межцентровое расстояние; 
 – половина угла между смежными пазами креста;
– половина угла между смежными пазами креста;  – угол поворота поводка, соответствующий повороту креста на угол
– угол поворота поводка, соответствующий повороту креста на угол  ;
;  – время полного оборота поводка;
– время полного оборота поводка;  – время остановки движения креста;
– время остановки движения креста;  – число оборотов водила и минуту.
– число оборотов водила и минуту.
Остановка движения креста имеет место во время поворота поводка на угол  . Для того, чтобы в начале и в конце поворота креста не было жестких ударов, вектор скорости пальца поводка должен быть направлен вдоль паза креста в этих крайних положениях, т.е. для плавного поворота креста и безударной работы механизма при входе и выходе пальца поводка должно выполняться условие
. Для того, чтобы в начале и в конце поворота креста не было жестких ударов, вектор скорости пальца поводка должен быть направлен вдоль паза креста в этих крайних положениях, т.е. для плавного поворота креста и безударной работы механизма при входе и выходе пальца поводка должно выполняться условие  .
.
В зависимости от числа пазов креста угол  можно определить как
можно определить как  .
.
Угловое ускорение креста в середине поворота креста.  (при
(при  ). Угловая скорость креста в этом положении достигает максимального значения
). Угловая скорость креста в этом положении достигает максимального значения
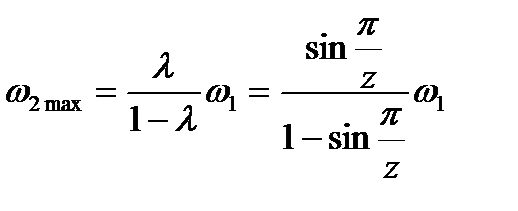 и
и 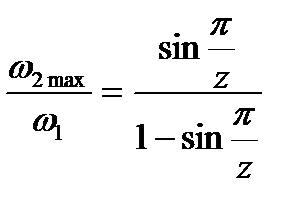 . Так как при
. Так как при  , при
, при  ; при
; при  ; при
; при  и при
и при  , то величина максимальной угловой скорости креста также будет тем меньше, чем больше число пазов креста и чем меньше угловая скорость поводка.
, то величина максимальной угловой скорости креста также будет тем меньше, чем больше число пазов креста и чем меньше угловая скорость поводка.
Положение механизма, при котором угловое ускорение креста достигает максимального значения, можно найти из уравнения  . Решение этого уравнения приводит к следующим результатам. При
. Решение этого уравнения приводит к следующим результатам. При  ; при
; при  ; при
; при  ; при
; при  и при
и при  , что показывает на целесообразность применения мальтийских механизмов с малым числом пазов креста.
, что показывает на целесообразность применения мальтийских механизмов с малым числом пазов креста.
Выбор основных размеров механизма. Если число остановок креста, требующихся по технологическому процессу, обозначить через  , число холостых остановок, т. е. таких, которые не требуются по технологическому процессу, но неизбежны при конструктивной компоновке механизма, через
, число холостых остановок, т. е. таких, которые не требуются по технологическому процессу, но неизбежны при конструктивной компоновке механизма, через  , то число пазов
, то число пазов  .
.
Задаваясь временем, необходимым для совершения наиболее длительной операции  можно из уравнения получить необходимое число оборотов поводка в минуту
можно из уравнения получить необходимое число оборотов поводка в минуту  .
.
Исходя из условия отсутствия жестких ударов в начале и в конце поворота креста определяются соотношения для выбора геометрических размеров механизма  и
и  . Задаваясь величиной L, можно определить r 1 и r 2. Длина паза креста равна
. Задаваясь величиной L, можно определить r 1 и r 2. Длина паза креста равна  .
.
§ Механизмы для преобразования вида движения
В приводах фасовочно-упаковочного оборудования наряду с распространенными кулачковыми и рычажными механизмами могут использоваться и другие механизмы преобразования вида движения, например, такие как, передачи винт-гайка скольжения или качения, реечные передачи и др.
|
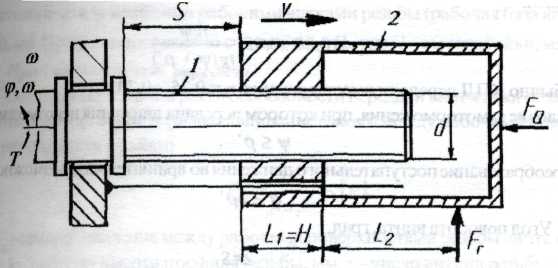
Передача винт-гайка скольжения. Механизмы, содержащие передачу винт-гайка скольжения служат для преобразования вращательного движения в поступательное и в некоторых случаях могут применяться для преобразования поступательного движения во вращательное (рис. 11. 26).
Рис. 11.26 Расчетная кинематическая схема передачи винт-гайка скольжения
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 722; Нарушение авторских прав?; Мы поможем в написании вашей работы!