КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Безразмерные коэффициенты для косинусоидального и синусоидального законов движения
|
|
|
|
При выборе схемы кулачкового механизма и типа кулачка нужно учесть соображения, изложенные выше, а также иметь в виду, что очертания профиля кулачка непосредственно зависят от закона движения толкателя, а не от закона движения рабочего органа, если последний не соединен жестко с толкателем. Если толкатель является лишь ведущим звеном передаточного механизма, с ведомым звеном которого соединен рабочий орган, за счет рациональной схемы передаточного механизма можно улучшить динамическую характеристику всего кулачково-рычажного механизма.
Выбор закона движения толкателя. Закон движения толкателя характеризуется зависимостями перемещений, скоростей, ускорений толкателя и динамической мощности от времени. Для качественной оценки законов движения основными критериями являются:
- безразмерный коэффициент пика скорости, ограничивающий технологическую скорость автомата  ;
;
- безразмерный коэффициент пика ускорения  , определяющий максимальные значения сил инерции
, определяющий максимальные значения сил инерции
- безразмерный коэффициент пика динамической мощности, затрачиваемой на разгон или остановку механизма и определяющей максимальные величины динамических нагрузок на детали привода  , где
, где  - приведенный к толкателю момент инерции звеньев механизма
- приведенный к толкателю момент инерции звеньев механизма
- безударность работы механизма, так как в результате внезапного появления ускорений в начале движения и возникающих при этом динамических усилий, действительный закон движения толкателя из-за упругих колебаний будет отличаться от теоретического закона движения.
| Законы движения | 
| 
| 
|
| Косинусоидальный | 1,57 | 4,94 | 3,88 |
| Синусоидальный | 2,00 | 6,28 | 8,15 |
На рис. 11.9 изображены кривые действительного (1) и теоретического (2) изменения ускорений для косинусоидального закона движения.
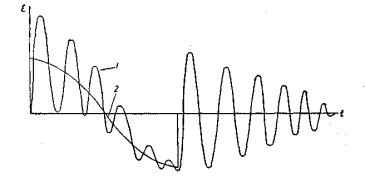
Рис. 11.9 Схемы действительной (1) и теоретической
(2) диаграмм ускорений для косинусоидального закона движения.
В большинстве исполнительных механизмов упаковочных автоматов преобладают динамические нагрузки, а статическими, действующими на рабочий орган, можно практически пренебречь. Поэтому при выборе закона движения толкателя с целью исключения ударных воздействий и уменьшения инерционных усилий необходимо, прежде всего, обеспечить плавное изменение кривой ускорений толкателя и возможно меньшие пики ускорений. Одновременно желательно получение возможно меньших значений пиков скорости и динамической мощности.
При выборе закона движения необходимо учитывать цикл движения толкателя. Пример цикловой диаграммы i-го исполнительного элемента автомата за один полный оборот кулачка приведен на рис. 11.10, где:
 – угол поворота толкателя от начального положения, соответствующего касанию ролика толкателя с основным диском кулачка;
– угол поворота толкателя от начального положения, соответствующего касанию ролика толкателя с основным диском кулачка;
 – угол поворота кулачка от начала движения;
– угол поворота кулачка от начала движения;
 – угол поворота кулачка, соответствующий прямому ходу;
– угол поворота кулачка, соответствующий прямому ходу;
 – угол поворота кулачка, соответствующий выстою толкателя после прямого хода;
– угол поворота кулачка, соответствующий выстою толкателя после прямого хода;
 – угол поворота кулачка, соответствующий обратному ходу;
– угол поворота кулачка, соответствующий обратному ходу;
 – угол поворота кулачка, соответствующий выстою толкателя в начальном положении.
– угол поворота кулачка, соответствующий выстою толкателя в начальном положении. 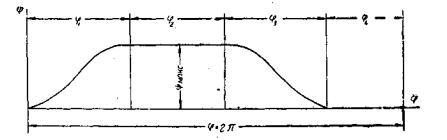
Рис. 11.10 Цикловая диаграмма исполнительного элемента автомата за один оборот кулачка.
Цикл движения элемента можно рассматривать состоящим из двух частей, характеризуемых чередованием перемещений и выстоев. При  рассматриваемый цикл движения элемента сводится к следующему: выстой – прямой ход – обратный ход выстой. При и
рассматриваемый цикл движения элемента сводится к следующему: выстой – прямой ход – обратный ход выстой. При и  получим движение без выстоев, т.е. прямой ход – обратный ход.
получим движение без выстоев, т.е. прямой ход – обратный ход.
Более сложные циклы движения при наличии трех и более выстоев в течение цикла, распадаются на несколько частей, каждая из которых характеризуется чередованием перемещений и выстоев: выстой – перемещение – выстой.
Таким образом, при выборе закона движения должны быть рассмотрены следующие расчетные циклы движения:
- выстой – перемещение – выстой;
- выстой – прямой ход – обратный ход – выстой;
- прямой ход – обратный ход.
При выборе закона движения толкателя следует учитывать способ замыкания: конструкцией кулачка и толкателя (геометрическое замыкание) или пружиной (силовое замыкание). При геометрическом замыкании высшей пары неизбежна игра толкателя из-за наличия зазоров между роликами толкателя и стенками паза или профилями кулачков. В результате этого возникает удар, так как фактическое начало движения толкателя не совпадает с теоретическим. В этом случае действительное движение толкателя начинается рывком в момент выборки игры, и скорость толкателя мгновенно достигает значения, соответствующего по теоретической диаграмме времени фактического начала движения. После достижения максимальной скорости, толкатель за счет наличия игры продолжает двигаться с этой скоростью до момента выборки игры, когда скорость вновь мгновенно изменяется. Поскольку величина энергии удара пропорциональна квадрату скорости движения, целесообразно при геометрическом замыкании высшей пары в кулачковом механизме выбирать закон движения с небольшой скоростью толкателя, соответствующей моменту фактического начала движения. Кроме того, при выборе закона движения толкателя нужно учитывать возможность осуществления выбранного закона движения в связи с точностью изготовления деталей механизма и в особенности с точностью обработки профиля кулачка.
Простейшими законами движения, обеспечивающими плавное изменение кривой ускорений толкателя, являются законы с косинусоидальной и синусоидальной диаграммами ускорений. Первый из них обеспечивает безударность работы при цикле прямой ход – обратный ход (без выстоев), а второй – при цикле выстой – перемещение – выстой.
Для косинусоидального закона движения  , для синусоидального закона движения
, для синусоидального закона движения  Применение косинусоидального закона движения для цикла прямой ход – обратный ход является более рациональным. Применение синусоидального закона движения для цикла выстой – перемещение – выстой, не является лучшим решением, вследствие высокие значений безразмерных коэффициентов пиков скорости, ускорения и динамической мощности.
Применение косинусоидального закона движения для цикла прямой ход – обратный ход является более рациональным. Применение синусоидального закона движения для цикла выстой – перемещение – выстой, не является лучшим решением, вследствие высокие значений безразмерных коэффициентов пиков скорости, ускорения и динамической мощности.
Следующие законы движения по К.В. Тиру имеют лучшие показатели, чем синусоидальный закон:
- закон движения с диаграммой ускорений из двух ветвей сопряженных гармоник (рис.11.11 а);
- закон движения с диаграммой ускорений, очерченной трапецией и вогнутой параболой степени  (рис. 11.11 б).
(рис. 11.11 б).
Для первого из этих законов движения на участке 
 и на участке
и на участке 
 .
.
Для второго закона движения на участке 
 , на участке
, на участке  и на участке
и на участке  .
.
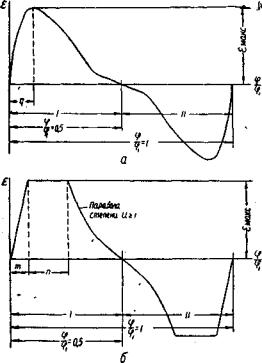
Рис.11.11 Законы движения с диаграммами ускорений а) из двух ветвей сопряженных гармоник; б) очерченной трапецией и вогнутой параболой.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1033; Нарушение авторских прав?; Мы поможем в написании вашей работы!