КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Способы описания функционирования электропривода
|
|
|
|
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ЭЛЕКТРОДВИГАТЕЛЕЙ И СПОСОБЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ИХ ВРАЩЕНИЯ
О
сновные способыописания функционирования ЭП в статических режимахимеют следующие характеристики [2,5]:
1) механическая характеристика – это зависимость, связы-вающая скорость и момент или силу элемента приведения ЭП (вала электродвигателя) или зависимость частоты вращения двигателя от развиваемого им на валу момента
 . (5.1)
. (5.1)
Механические характеристики имеют также рабочие механизмы:
3) электромеханическая характеристика – это зависимость, связывающая скорость электродвигателя ЭП и ток якоря:
 . (5.2)
. (5.2)
Механические характеристики в ЭП рассматриваются так, что их независимой координатой является электромагнитный момент М, раз-виваемый электродвигателем:
 (5.3)
(5.3)
В выражениях (5.1) и (5.3) момент вращениия на валу МВ и электро-магнитный момент М электродвигателя связаны соотношением
 , (5.4)
, (5.4)
где ∆M – потери момента вращения, обусловленные наличием трения в подшипниках, вентиляционными потерями и потерями в стали, причем знак минус соответствует двигательному, а знак плюс – генераторному режимам работы электродвигателя.
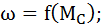
Различают естественные и искусственные характеристики элект-родвигателя [1  4]. Естественная характеристика соответствует номи-нальным параметрам питающего электродвигатель напряжения, ос-новной схеме его включения и отсутствию добавочных электротехни-ческих элементов в цепях электродвигателя. Общий вид естественных механических характеристик электродвигателей различных типов приве-ден на рис.5.1.
4]. Естественная характеристика соответствует номи-нальным параметрам питающего электродвигатель напряжения, ос-новной схеме его включения и отсутствию добавочных электротехни-ческих элементов в цепях электродвигателя. Общий вид естественных механических характеристик электродвигателей различных типов приве-ден на рис.5.1.
 Искусственные ха-рактеристики служат для регулирования параме-тров ЭП:скорости момен-та, тока якоря и т.д., и формирования различных режимов его работы; их получают путем измене-ния параметров питаю-щего электродвигатель напряжения (по модулю, полярности, частоте и т.п.) и (или) схемы его включения.
Искусственные ха-рактеристики служат для регулирования параме-тров ЭП:скорости момен-та, тока якоря и т.д., и формирования различных режимов его работы; их получают путем измене-ния параметров питаю-щего электродвигатель напряжения (по модулю, полярности, частоте и т.п.) и (или) схемы его включения.
| Рис. 5.1. Естественные механические характеристики электродвигателя |
Сравнение характеристик различных электродвигателей или од-ного и того же электродвигателя при различных способах регулирования скорости выполняется с помощью критериев "жесткость" или "кру-тизна" характеристики. Под жесткостью механической характерис-тики понимают отношение из-менения момента, развиваемого двига-телем, к изменению его угловой скорости (∆М/∆ω).
Крутизна  характеристики является величиной, обратной жесткос-ти:
характеристики является величиной, обратной жесткос-ти:
Различают абсолютно жесткие характеристики с =0, жесткие характеристики с | |  0,1 и мягкие характеристики, с | | >0,1. Абсо-лютно жесткую характеристику имеет синхронный двигатель (рис.5.1, характеристика I).
0,1 и мягкие характеристики, с | | >0,1. Абсо-лютно жесткую характеристику имеет синхронный двигатель (рис.5.1, характеристика I).
Жесткими являются естественная характеристика электродвигателя постоянного тока с независимым (параллельным) возбуждением (харак-теристика 2) и рабочий участок механической характеристики асин-хронного двигателя (характеристика 3). Мягкую характеристику имеет, например, ДПТ последовательного возбуждения при работе с момен-тами, меньшими номинального (характеристика4). Жесткость механи-ческой характеристики может быть постоянной во всем диапазоне изменения момента (двигатель имеет линейную характеристику) или же переменной (двигатель имеет нелинейную харак-теристику). На рис. 5.1 для характеристик 1 и 2 β = const, для характерис-тик 3 и 4 β = var.
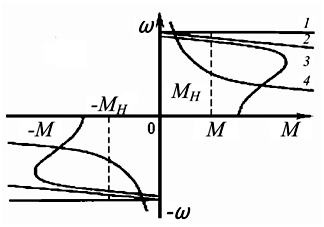
| Рис.5.2. Искусственные механические характеристики электродвигателей постоянного тока с последовательным возбуждением |
Электрические маши-ны постоянного и пере-менного тока могут рабо-тать как в двигательном, так и в тормозных ре-жимах.
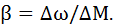
| Рис. 5.3. Искусственные механические характеристики асинхронных электродвигателей |
 В двигательном ре-жиме, машина преоб-разует электрическую энергию, подводимую из сети, в механическую на валу, за исключением потерь в двигателе. Ме-ханические характерис-тики машин в этом ре-жиме для различных направлений вращения приведены на рис.5.1 и располагаются в I и III квадрантах координат-ной плоскости
В двигательном ре-жиме, машина преоб-разует электрическую энергию, подводимую из сети, в механическую на валу, за исключением потерь в двигателе. Ме-ханические характерис-тики машин в этом ре-жиме для различных направлений вращения приведены на рис.5.1 и располагаются в I и III квадрантах координат-ной плоскости  М.
М.
Работа в тормозных режимах сопровождается преобразованием подводимой к валу двигателя механической энергии (или запасенной кинетической энергии) в электрическую на зажимах двигателя. Различают три основных тормозных режима: противовключение, рекуперативное и динамичес-кое торможение.
Противовключением называется режим работы машины, когда она, будучи включенной для одного направления вращения, под действием момента инерции или момента нагрузки вращается в обратном направлении.
 Такое торможение связано с протеканием по цепи якоря (у двигателей постоянного тока) или ротора (у асинхронных двигателей) токов, значительно (в 10 и более раз) превосхо-дящих номинальное значение.
Такое торможение связано с протеканием по цепи якоря (у двигателей постоянного тока) или ротора (у асинхронных двигателей) токов, значительно (в 10 и более раз) превосхо-дящих номинальное значение.
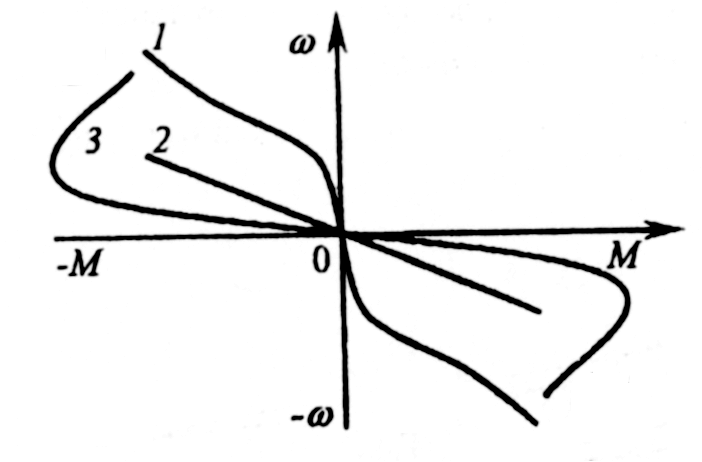
| Рис.5.4. Механические характеристики двигателей в режиме динамического торможения |
С целью ограничения тока в цепь якоря или ротора вклю-чают ограничивающие сопро-тивления. В этом режиме ма-шина потребляет элект-ри-ческую энергию из сети и механическую энергию, подводимую к её валу, расходуя их на нагрев обмоток и дополнительно включенных со-противлений.
Механические характеристики этого режима работы для различ-ных направлений вращения располагаются во II и IV квадрантах, являясь продолжением характеристик двигательного режима при изменении знака скорости (рис.5.2).
Искусственные механические характеристики электродвигателей постоянного тока с независимым (параллельным) возбуждением (5.1), с последовательным возбуждением (5.2) и электродвигателя (5.3) в режиме противовключения (выделены жирно) приведены на рис.5.2.
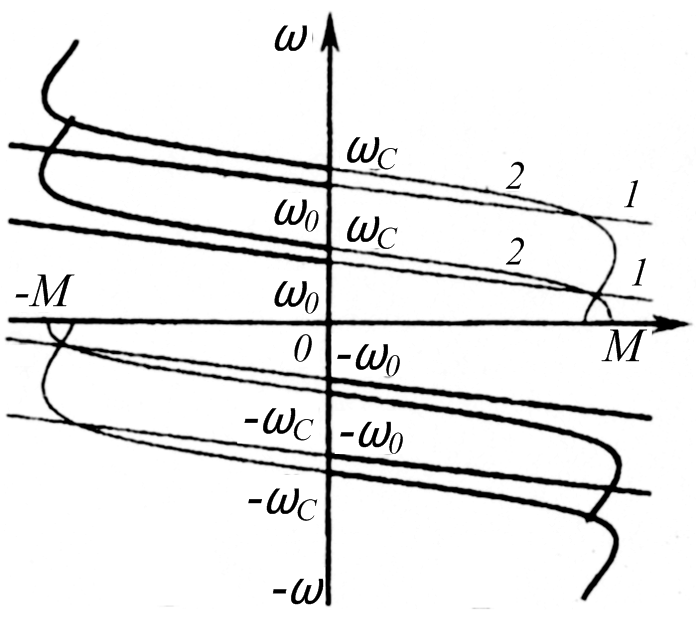
Режим рекуперации – это такой режим работы, в котором машина преобразует механическую энергию, под-водимую к ее валу, в элек-трическую на зажимах и от-дает её в сеть.
Условием возвращения энергии является вращение якоря ДПТ с НВ или ротора АД со скоростью, превыша-ющей, соответственно, ско-рость идеального холостого хода  или синхронную скорость С. Механические характеристики этого режима представ-ляют собой продолжение характеристик двигательного режима и располагаются во II и IV квадрантах. Угловая скорость 0 ( с) может быть различной и зависит:
или синхронную скорость С. Механические характеристики этого режима представ-ляют собой продолжение характеристик двигательного режима и располагаются во II и IV квадрантах. Угловая скорость 0 ( с) может быть различной и зависит:
- для машин постоянного тока с независимым возбуждением от напряжения на якоре электродвигателя UЯ и потока возбуждения Ф;
- для асинхронных машин от частоты f питающего напряжения и числа пар полюсов р. Режим рекуперации может возникать при резком сниже-нии напряжения на якоре двигателя или усилении потока его возбуж-дения для машин постоянного тока параллельного (независимого) воз-буждения. Для асинхронного двигателя – при уменьшении частоты пита-ющего напряжения или переключении числа пар полюсов с меньшего на большее (рис. 5.3).
Механические характеристики двигателя постоянного тока неза-висимого возбуждения (1) и асинхронного двигателя (2) в режиме реку-перации приведены на рис. 5.3.
Для двигателей постоянного тока с последовательным возбужде-нием (сериесных электродвигателей) режим рекуперации невозможен.
Режим динамического торможения электродвигателя получают следующим образом: для асинхронных электродвигателей, отключив обмотку статора от сети и подав в неё постоянный ток; для машин пос-тоянного тока с независимым возбуждением, отключив якорь элек-тродвигателя от питающей сети и замкнув его на разрядное сопро-тивление (или накоротко) при сохранении магнитного потока; для электродвигателей постоянного тока последовательного возбуждения, отключив всю силовую цепь машины (якорь и обмотку возбуждения) от питающего напряжения и замкнув её на разрядное сопротивление (или накоротко) при сохранении первоначального направления тока в сериесной обмотке (так называемое динамическое торможение с самовозбуждением); для этих электродвигателей возможен режим динамического торможения и с независимым возбуждением. Так как скорости О и С в режиме динамического торможения равны нулю, то механические характеристики проходят через начало координат, располагаясь во II и IV квадрантах. Все описанные режимы получают изменением нагрузки испытуемого электродвигателя с помощью вспо-могательной машины (постоянного тока), механически соединенной с ним.
Как правило, используются электрические методы измерения физи-ческих величин, в том числе момента и скорости электродвигателей. Ме-ханические характеристики сериесного электродвигателя (1), двигателя постоянного тока с независимым возбуждением (2), асинхронного дви-гателя (3) в режиме динамического торможения приведены на рис. 5.4.
Угловая скорость электродвигателя измеряется, как правило, с помощью тахогенератора, установленного на валу
 ,
,
где UBR  напряжение на зажимах якоря тахогенератора, В;
напряжение на зажимах якоря тахогенератора, В;

постоянная тахогенератора, (рад/с) / В. Электромагнитный момент двига-теля, как правило, рассчитывают по полученным опытным путем значе-ниям тока якоря (IЯ вспомогательной (нагрузочной) машины постоян-ного тока, используя формулу
 ,
,
где Е/ω = const – предварительно измеренное отношение ее электродви-жущей силы Е к угловой скорости ω при сохранении постоянства потока возбуждения Ф этого двигателя в процессе работы; С – конструктивная постоянная нагрузочной машины.
Чтобы найти требуемое значение момента М испытуемого двига-теля, необходимо учесть потери в обоих связанных по валу электро-двигателях:
 ,
,
где МИМ и МНМ – моменты испытуемой и нагрузочной машин соот-ветственно.
Потери  МИМ и МНМ могут быть приближенно найдены либо экспериментально (по разности пусковых моментов нагрузочной маши-ны при включении в прямом и обратном направлениях вращения), либо расчетным путем (как разность значений моментов М НОМ и МВНОМ каждого двигателя спарки по их паспортным данным).
МИМ и МНМ могут быть приближенно найдены либо экспериментально (по разности пусковых моментов нагрузочной маши-ны при включении в прямом и обратном направлениях вращения), либо расчетным путем (как разность значений моментов М НОМ и МВНОМ каждого двигателя спарки по их паспортным данным).
Ток цепей возбуждения составляет 3 5 % от номинального тока якоря
 .
.
Резисторы, включенные в цепи якоря, ротора, статора и возбужде-ния, должны иметь номинальный ток не ниже номинального тока соот-ветствующей цепи. Резисторы для цепей возбуждения должны выби-раться с сопротивлением, в 3 5 раз большим сопротивления обмотки возбуждения. Ориентировочно сопротивление цепей возбуждения опре-деляется:
 .
.
Таким образом, электромеханические свойства электродвигателей определяются, главным образом, их механическими характеристиками. Согласование механических характеристик рабочего механизма и двига-теля – одна из важных задач при выборе двигателя.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 904; Нарушение авторских прав?; Мы поможем в написании вашей работы!