КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Побудова плану прискорень
|
|
|
|
Аналогічно побудові плану швидкостей будується план прискорень.
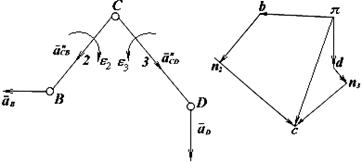
Нехай маємо двоповодкову групу ВСD (рис.1,а).
Вихідними даними для неї є вектори прискорень у точках В та D (у відкритих кінематичних парах)  та
та  і довжини ланок 2 та 3. Необхідно визначити прискорення точки С.
і довжини ланок 2 та 3. Необхідно визначити прискорення точки С.
Рух точки С розглядаємо як складний, який складається із переносно-поступального зі швидкістю та прискоренням точки В або D і відносно-обертального навколо цих точок.
Запишемо векторні рівняння:
де  ,
,  – нормальні прискорення у відносному русі;
– нормальні прискорення у відносному русі;  ,
,  – тангенціальні (дотичні) прискорення у тому ж русі.
– тангенціальні (дотичні) прискорення у тому ж русі.
Розв’язуючи рівняння, маємо:
 . (3)
. (3)
У рівнянні (3) відомі за величиною і напрямком прискорення точок В та D, тобто та  . Вектори нормальних прискорень
. Вектори нормальних прискорень  та
та  визначаються за формулами:
визначаються за формулами:
а) б)
Рис.1
Швидкості  і
і  можуть бути визначені із плану швидкостей. Тоді:
можуть бути визначені із плану швидкостей. Тоді:
Вектор прискорення напрямлений із точки С у точку В паралельно ланці ВС (див. рис.1,а), а вектор прискорення – від точки С у точку D паралельно ланці СD.
Таким чином, нормальні прискорення відомі за величиною і напрямком. Вектори і відомі тільки за напрямком: вони напрямлені перпендикулярно до ланок відповідно ВС і CD. Величини їх можна визначити графічно, побудовою плану прискорень.
Обираємо за полюс точку π і відкладаємо відрізки πb та πd у масштабі μа, що зображають вектори прискорень  та (рис.1,б). Так само, як і для плану швидкостей, при виборі масштабу μа плану прискорень керуються зручністю обчислень і графічних побудов:
та (рис.1,б). Так само, як і для плану швидкостей, при виборі масштабу μа плану прискорень керуються зручністю обчислень і графічних побудов:
Далі визначаємо та і відкладаємо відповідно із точок b та d відрізки bn2 та dn3:
паралельно ланкам 2 і 3, а із точок n2 та n3 проводимо прямі, перпендикулярні до ланок ВС і CD (напрямки тангенціальних складових прискорень). Точка перетину і дасть кінець шуканого вектора  :
:

Маючи план прискорень, можна визначити кутові прискорення ε2 та ε3 ланок 2 та 3. Їх модулі дорівнюють:

або
де  BC, CD – довжини ланок відповідно 2 та 3 у метрах.
BC, CD – довжини ланок відповідно 2 та 3 у метрах.
Напрямки кутових прискорень визначається таким чином. Подумки переносимо вектори  та
та  , що зображаються відрізками n2с та n3c, із плану прискорень у точку С, і бачимо, що напрямок ε2 збігається з напрямком ходу годинникової стрілки, а напрямок ε2 протилежний ходу годинникової стрілки.
, що зображаються відрізками n2с та n3c, із плану прискорень у точку С, і бачимо, що напрямок ε2 збігається з напрямком ходу годинникової стрілки, а напрямок ε2 протилежний ходу годинникової стрілки.
Методи пропорційних відрізків та подібних фігур справедливі й при побудові плану прискорень.
2. Приклад кінематичного аналізу плоского механізму методом планів
Виконати кінематичне дослідження механізму, зображеного на рис.2,а методом планів швидкостей і прискорень.
Вихідні дані: закон руху ведучої ланки у вигляді ω=const і кінематична схема механізму, побудована в масштабі μl.
Спочатку виконаємо структурний аналіз механізму. Цей шарнірно-важільний механізм ІІ класу ІІ порядку складається із двох груп Ассура ABD та CEF та однієї ведучої групи, до складу якої входить стояк та кривошип 1.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 2509; Нарушение авторских прав?; Мы поможем в написании вашей работы!