КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система автоматического управления с нейросетевым регулятором на основе эталонной модели
|
|
|
|
В качестве примера моделирования в среде Simulink систем управления с использованием нейросетевых регуляторов используем пример, иллюстрирующий систему управления с эталонной моделью реактора полного перемешивания (рис.36).
Рис.36. Реактор полного перемешивания ( расходы,
расходы,  уровень,
уровень,  концентрации компонентов на входе и выходе из реактора, соответственно).
концентрации компонентов на входе и выходе из реактора, соответственно).
Изменения концентрации в реакторе и на выходе из него, а также уровень жидкости в реакторе (динамическая модель системы) представлены следующей системой дифференциальных уравнений (получены из уравнений материального баланса):


где и
и  - константы,
- константы,  ,
,  .
.
Цель автоматического управления - стабилизировать концентрацию на выходе, регулируя поток  (расход
(расход  является величиной постоянной). Уровень резервуара
является величиной постоянной). Уровень резервуара  не является управляемым параметром.
не является управляемым параметром.
Соответствующая динамическая модель объекта регулирования приведена на рис.37.
Рис.37. Структурная динамическая модель реактора
Структурная схема, поясняющая принцип построения системы управления показана на рис.38.

Рис.38. Система управления (Plant – объект управления, Learning algorithm – обучающий алгоритм
Автоматический регулятор состоит из нейронной сетевой модели объекта и блока оптимизации рис.39). Блок оптимизации определяет оптимальное значение управляющего параметра (u), который подается на вход объекта.
Рис.39.
Рис. 40. Структура нейросетевой системы управления ректора полного перемешивания (random reference - программа генерирует обучающиеся данные, применяя случайные сигналы к Simulink модели объекта).
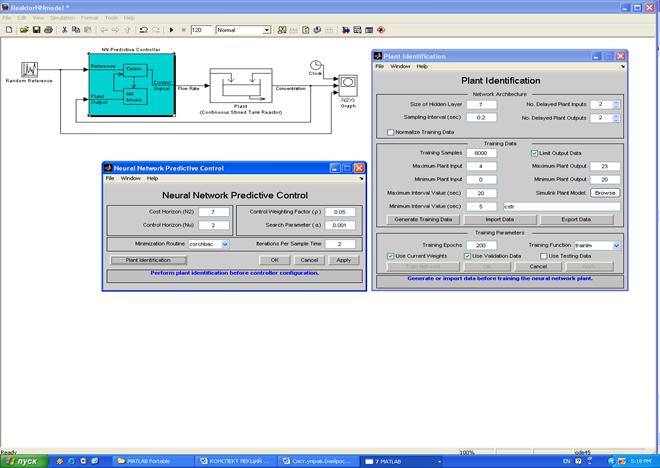
На рис.41 показано как строится НС модели регулятора в окне Neural Network Predictive Control и окне Plant Identiffication ( весовой фактор,
весовой фактор,  параметр оптимизации)
параметр оптимизации)
На рис.42 показан график регулирования концентрации продукта на выходе реактора.
 |
Рис.41.
Рис.42. График регулирования концентрации продукта на выходе реактора.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 624; Нарушение авторских прав?; Мы поможем в написании вашей работы!