КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пристрої для вимірювання показників положення елементів пристроїв станів
|
|
|
|
Методи вимірювання кінематичних показників пристроїв станів та прокату
Кінематичні показники пристроїв станів та прокату.
Вимірювання кінематичних показників пристроїв станів та прокату.
Лекція № 27
1 Кінематичні показники пристроїв станів та прокату.
2 Методи вимірювання кінематичних показників пристроїв станів та прокату.
Кінематичні показники пристроїв прокатних станів:
- лінійні і кутові координати (показники положення);
- лінійні і кутові переміщення, швидкості і прискорення їх рухомих елементів.
Основні кінематичні показники прокату:
- лінійні координати смуги;
- прогиб (провисання) смуги між клітями при безперервному плющенні;
- швидкість прокатуваної смуги (швидкість плющення);
- швидкість транспортування смуги.
 Пристрої для вимірювання показників положення елементів пристроїв станів можуть будуватися на основі аналогових і дискретних первинних перетворювачів положення різних типів. Застосовують реостатні, індуктивні, ємкісні, фотоелектричні і інші аналогові первинні перетворювачі положення.
Пристрої для вимірювання показників положення елементів пристроїв станів можуть будуватися на основі аналогових і дискретних первинних перетворювачів положення різних типів. Застосовують реостатні, індуктивні, ємкісні, фотоелектричні і інші аналогові первинні перетворювачі положення.
Не дивлячись на простоту конструкції аналогові перетворювачі положення знаходять обмежене застосування унаслідок їх щодо низької точності.
 Основним елементом дискретного перетворювача положення є реле положення, що э елементом, вихідна величина якого може приймати одне з двох можливих значень залежно від положення, яке займає відносно реле ініциатор спрацьовування реле. Знаходять застосування фотоелектричні, індуктивні, ємкісні і деякі інші типи реле положення.
Основним елементом дискретного перетворювача положення є реле положення, що э елементом, вихідна величина якого може приймати одне з двох можливих значень залежно від положення, яке займає відносно реле ініциатор спрацьовування реле. Знаходять застосування фотоелектричні, індуктивні, ємкісні і деякі інші типи реле положення.
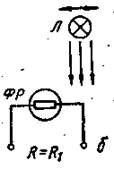
Принцип дії фотоелектричного реле положення пояснюється малюнком 1. Фотореле положення в представляє фотоелектричний вимірювальний перетворювач - фоторезистор (ФР). Ініціатором спрацьовування реле є джерело світла - лампа (Л). Залежно від відносного положення лампи Л і фоторезистора ФР його опір R може приймати значення R0 (мал. 1, а) і R1 (мал. 1, б).
Індуктивні і ємкісні реле положення будуються на основі індуктивних і ємкісних вимірювальних перетворювачів. Ініціаторами спрацьовування цих реле служать зазвичай пластини з магнітних і немагнітних металів і діелектриків.
Ініціатором спрацьовування реле положення може служити безпосередньо рухомий елемент пристрою.
Реле положення може використовуватися як реле наявності рухомого елементу пристрою в заданій точці простору. Для цього реле положення нерухомо встановлюється в заданій точці простору, а рухомий елемент виступає в ролі ініціатора спрацьовування реле, або механічно з'єднується з ним.
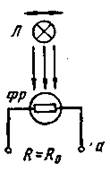
Широке застосування отримали дискретні кодові перетворювачі положення рухомих елементів пристроїв. Приклад кодового перетворювача кутового положення рухомого елементу пристрою схематично показаний на мал. 2. За допомогою перетворювача вимірюється кутова координата φ рухомого елементу М пристрою. Перетворювач складається з трьох нерухомо встановлених реле положення 1-3 і ініціатора спрацьовування реле І - кодуючого диска. Кодуючий диск механічно з'єднується з рухомим елементом пристрою М.
 Якщо приймати вихідний сигнал m-ного реле перетворювача при знаходженні в місці його розміщення активної (заштрихованою) зони кодуючого диска за одиницю (уm=1), а пасивною (незаштрихованою) - за нуль (уm=0), то комбінація у=(у3, у2, у1) вихідних сигналів реле положення 1-3 представляє значення координати φ числом в паралельному двійковому коді (на мал. 2 у= (0, 0, 1), тобто координата φ представляється двійковим числом 001).
Якщо приймати вихідний сигнал m-ного реле перетворювача при знаходженні в місці його розміщення активної (заштрихованою) зони кодуючого диска за одиницю (уm=1), а пасивною (незаштрихованою) - за нуль (уm=0), то комбінація у=(у3, у2, у1) вихідних сигналів реле положення 1-3 представляє значення координати φ числом в паралельному двійковому коді (на мал. 2 у= (0, 0, 1), тобто координата φ представляється двійковим числом 001).
Перетворювач здійснює квантування вимірюваної координати з інтервалом квантування α.
Застосовуються кодові перетворювачі положення, що забезпечують кодування до 10000 різних положень рухомого елементу пристрою.
 Для вимірювання переміщення рухомих елементів пристроїв застосовуються дискретні перетворювачі, що перетворюють величину переміщення в число імпульсів, або число-імпульсні перетворювачі переміщення.
Для вимірювання переміщення рухомих елементів пристроїв застосовуються дискретні перетворювачі, що перетворюють величину переміщення в число імпульсів, або число-імпульсні перетворювачі переміщення.
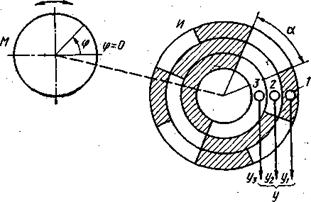
Приклад число-імпульсного перетворювача кутового переміщення схематично показаний на мал. 3, а. Перетворювач забезпечує вимірювання зміни Δφ кутової координати φ рухомого елементу пристрою М. Він складається з двох нерухомих реле положення 1 і 2 і ініціатору спрацьовування реле І. Ініціатор - це диск із зубцями, розташованими по його периферії з рівномірним кутовим кроком α, рівним інтервалу дискретизації вимірюваної величини. Реле положення 1 і 2 встановлені під кутом α/4 один до одного. Рухомий елемент пристрою М механічно пов'язаний з ініціатором.
При проходженні зубцем ініціатора місця розташування реле воно виробляє імпульс. При повороті елемента з одного кутового положення в інше реле положення 1 і 2 виробляють дві серії імпульсів у1 і у2, зміщені в часі одна щодо іншої.
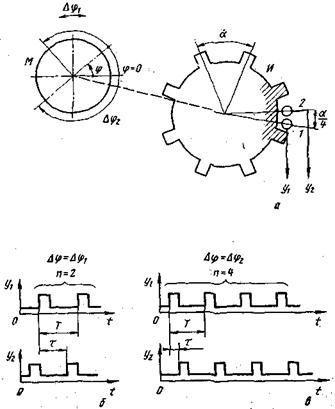

Вихідними змінними перетворювача є число імпульсів в серії n і час τ відставання імпульсів реле 2 від імпульсів реле 1. Число імпульсів n пропорціонально абсолютному значенню вимірюваної величини |Δφ|, а величина τ відображає напрям (знак) кутового переміщення:
де Т - період проходження імпульсів.
Тимчасові диаграми вихідних сигналів реле 1 і 2 при повороті рухомого елементу з положення φ на кут Δφ = Δφ1 показані на мал. 3, б, а з положення Δφ на кут Δφ2 - на мал. 3, в.
У нереверсивному перетворювачі достатньо використовувати одне реле положення.
Знаходять застосування число-імпульсні перетворювачі кутового переміщення, що виробляють до декількох сотен імпульсів за один оборот диска.
Вимірники швидкості переміщення рухомих елементів пристроїв будуються як на основі аналогових, так і на основі дискретних перетворювачів швидкості.
Як аналогові перетворювачі кутової швидкості елементів пристроїв, що обертаються, застосовують тахогенератори.
Тахогенератор представляє мікроелектромашину генераторного типу, е.д.с. якій при постійному значенні потоку збудження пропорціональна кутової швидкості її ротора. Застосовуються тахогенератори постійного і змінного струму.
Як дискретні перетворювачі кутової швидкості застосовуються перетворювачі, що перетворюють кутову швидкість елементу пристрою в часовий параметр імпульсного сигналу, що обертається, або часо-імпульсні перетворювачі кутової швидкості.
Прикладом часо-імпульсного перетворювача кутової швидкості може служити перетворювач, схема якого показана на мал. 3, а, якщо за вихідну величину його замість числа імпульсів прийняти період проходження імпульсів Т. При цьому миттєве значення кутової швидкості ініціатора ω=α/Т. Напрямок обертання, як і при вимірюванні кутового переміщення, визначається часом відставання імпульсів реле 2 від імпульсів реле 1.
Для вимірювання прискорення рухомих елементів пристроїв застосовуються вимірники на основі аналогових інерційних перетворювачів прискорення, які перетворюють вимірюване прискорення в інерційне зусилля, що діє на масу при прискоренні.
Для вимірювання лінійних координат, переміщень, швидкостей і прискорень рухомих елементів пристроїв станів можуть бути використані перетворювачі, що в принципі не відрізняються від перетворювачів відповідних кутових показників. Проте у багатьох випадках зручніше здійснювати вимірювання лінійних кінематичних показників з перетворенням їх в кутові. Наприклад, положення і переміщення натискних гвинтів прокатної кліті вимірюють за допомогою кінематично пов'язаних з ними перетворювачів кутового положення або число-імпульсних перетворювачів кутового переміщення.
Перетворювач будь-якого з кінематичних показників пристрою може бути використаний для вимірювання будь-якого іншого з цих показників. Наприклад, диференціюючи за часом вихідний сигнал аналогового перетворювача положення рухомого елементу пристрою, можна визначити швидкість його руху і так далі.
Розглянуті перетворювачі кінематичних показників пристроїв можуть бути використані також для вимірювання показників положення і руху рухомих елементів пристроїв щодо один одного.
2.2 Пристрої для вимірювання кінематичних показників прокату:
Вимірюються наступні основні кінематичні показники прокату:
- лінійні координати смуги;
- прогиб (провисання) смуги між клітями при безперервному плющенні;
- швидкість прокатуваної смуги (швидкість плющення);
- швидкість транспортування смуги.
Застосовується три основні види вимірювання кінематичних показників прокату:
- пряме;
- з проміжним перетворенням в кінематичні показники пристроїв;
- комбіноване.
Пряме вимірювання здійснюється за допомогою дискретних перетворювачів лінійних кінематичних показників прокату з використанням прокату в якості ініціатора спрацьовування реле положення або джерела світла.
Приклади перетворювачів прямого вимірювання показників положення прокату представлені на мал. 4 і 5.
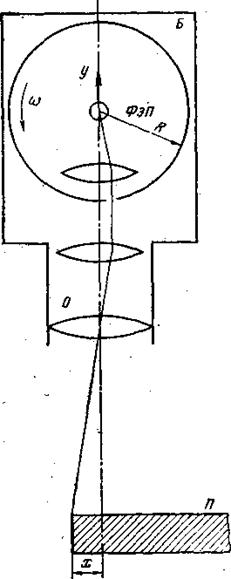 На мал. 4 показана схема фотоелектричного часо-імпульсного перетворювача положення гарячого прокату. Перетворювач забезпечує вимірювання координати х кромки (торця) прокату П. Він складається з фотоелектричного перетворювача ФЕП, барабана розгортки Б з отвором, приводу барабана розгортки (умовно не показаний), а також оптичної системи О. Привод барабана забезпечує його обертання з постійною кутовою швидкістю ω. Світло, що випромінюється смугою, нагрітою до температури плющення, через оптичну систему і отвір в барабані потрапляє на ФЕП. Фотоелектричний перетворювач, барабан розгортки і смуга можуть розглядатися як фотореле положення, ініціатором спрацьовування якого є барабан. За кожен оборот барабана фотоелектричний перетворювач виробляє імпульс. Період проходження імпульсів Т=2π/ω, а тривалість імпульсу є функція вимірюваної координати х.
На мал. 4 показана схема фотоелектричного часо-імпульсного перетворювача положення гарячого прокату. Перетворювач забезпечує вимірювання координати х кромки (торця) прокату П. Він складається з фотоелектричного перетворювача ФЕП, барабана розгортки Б з отвором, приводу барабана розгортки (умовно не показаний), а також оптичної системи О. Привод барабана забезпечує його обертання з постійною кутовою швидкістю ω. Світло, що випромінюється смугою, нагрітою до температури плющення, через оптичну систему і отвір в барабані потрапляє на ФЕП. Фотоелектричний перетворювач, барабан розгортки і смуга можуть розглядатися як фотореле положення, ініціатором спрацьовування якого є барабан. За кожен оборот барабана фотоелектричний перетворювач виробляє імпульс. Період проходження імпульсів Т=2π/ω, а тривалість імпульсу є функція вимірюваної координати х.
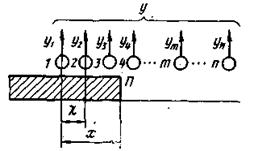 На мал. 5 представлена схема фотоелектричного кодового перетворювача пололоження гарячого прокату. Перетворювач складається з n фотореле положення 1, 2... n, розташованих уздовж траекторії руха прокату на однакових відстанях χ один від одного. Ініціатором спрацьовування фотореле є смуга П, що має температуру плющення.
На мал. 5 представлена схема фотоелектричного кодового перетворювача пололоження гарячого прокату. Перетворювач складається з n фотореле положення 1, 2... n, розташованих уздовж траекторії руха прокату на однакових відстанях χ один від одного. Ініціатором спрацьовування фотореле є смуга П, що має температуру плющення.
|
Якщо приймати вихідний сигнал m-ого фотореле при знаходженні смуги в місці його розташування за одиницю (уm=1), а при відсутності за нуль (уm=0), то комбінація вихідних сигналів фотореле 1, 2, n у=(у1, у2,..., уm...,уn) представляє значення координати х в паралельному унітарному коді [на мал. 5 у=(1, 1, 1, 0..., 0...,0)].
Інтервал дискретизації координати х рівний χ.
Перетворювачі, схеми яких показані на мал. 4 і 5, можуть бути також використані для прямого вимірювання прогину (провисання) смуги між клітями при безперервному плющенні.
Вимірювання кінематичних показників прокату з проміжним перетворенням в кінематичні показникі пристроїв полягає у визначенні цих показників за наслідками вимірювання координат, пересувань і швидкості робочих валків, вимірювальних роликів і петлеутворювачів.
У ряді випадків доцільно застосовувати комбіноване вимірювання кінематичних показників прокату, що полягає в одночасному прямому вимірюванні і вимірюванні з проміжним перетворенням підлеглих для визначення показників.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 496; Нарушение авторских прав?; Мы поможем в написании вашей работы!