КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №10. Твердое тело как система материальных точек
|
|
|
|
Твердое тело как система материальных точек. Абсолютно твердое тело. Поступательное и вращательное движение абсолютно твердого тела. Мгновенные оси вращения. Момент силы. Момент инерции. Уравнение динамики вращательного движения тела относительно неподвижной оси.
Лекция № 8. Работа силы, мощность энергия. Консервативные и неконсервативные силы и системы. Независимость работы консервативной силы от траектории. Кинетическая энергия. Потенциальная энергии. Связь силы с потенциальной энергией. Закон сохранения механической энергии в консервативной системе. Внутренняя энергия. Закон сохранения энергии в неконсервативной системе. Применение законов сохранения импульса и энергии при анализе упругих и неупругих ударов.
Если под действием некоторой силы  тело совершает элементарное перемещение
тело совершает элементарное перемещение  , то говорят, что сила совершает элементарную работу
, то говорят, что сила совершает элементарную работу  (рис. 1). Вектор силы можно разложить на две составляющие, одна из которых
(рис. 1). Вектор силы можно разложить на две составляющие, одна из которых  совпадает по направлению с вектором перемещения, другая
совпадает по направлению с вектором перемещения, другая  перпендикулярна ему.
перпендикулярна ему.
Очевидно, что перемещать тело, а, следовательно, совершать работу будет только составляющая силы . Таким образом, элементарная работа
 , (1)
, (1)
где a – угол между вектором силы и элементарным перемещением.
Так как скалярное произведение двух векторов равно произведению их модулей на косинус угла между ними, то
 . (2)
. (2)
Для того чтобы определить работу по всей траектории движения, необходимо просуммировать работы на каждом элементарном участке
 . (3)
. (3)
Единицей работы в СИ служит работа, совершаемая на пути в один метр с силой в один ньютон, действующей в направлении перемещения. Эта единица называется джоулем (Дж), т.е. 1 Дж = 1 Н×1 м.
Заметим, что в джоулях измеряется также энергия, количество теплоты.
Работа, совершаемая в единицу времени, называется мощностью:
 . (4)
. (4)
Единицей мощности в СИ является ватт (Вт) – это такая мощность, при которой за одну секунду совершается работа, равная одному джоулю, т. е. 1 Вт = 1 Дж/1с. Заметим, что 1 кВт = 103 Вт, 1 МВт = 106 Вт, 1 ГВт = 109 Вт (приставка М читается как «мега», а приставка Г – как «гига»). В технике иногда применяется единица мощности, именуемая лошадиной силой (л. с.) и равная 736 Вт.
 Все силы, встречающиеся в механике, принято разделять на консервативные и неконсервативные.
Все силы, встречающиеся в механике, принято разделять на консервативные и неконсервативные.
Сила, действующая на материальную точку, называется консервативной (потенциальной), если работа этой силы зависит только от начального и конечного положений точки. Работа консервативной силы не зависит ни от вида траектории, ни от закона движения материальной точки по траектории (см. рис. 2):  .
.
Изменение направления движения точки вдоль малого участка на противоположное вызывает изменение знака элементарной работы  , следовательно,
, следовательно,  . Поэтому работа консервативной силы вдоль замкнутой траектории 1 a 2 b 1 равна нулю:
. Поэтому работа консервативной силы вдоль замкнутой траектории 1 a 2 b 1 равна нулю:  .
.
 Точки 1и 2, а также участки замкнутой траектории 1 a 2 и 2 b 1 можно выбирать совершенно произвольно. Таким образом, работа консервативной силы по произвольной замкнутой траектории L точки ее приложения равна нулю:
Точки 1и 2, а также участки замкнутой траектории 1 a 2 и 2 b 1 можно выбирать совершенно произвольно. Таким образом, работа консервативной силы по произвольной замкнутой траектории L точки ее приложения равна нулю:
 или
или  . (5)
. (5)
В этой формуле кружок на знаке интеграла показывает, что интегрирование производится по замкнутой траектории. Часто замкнутую траекторию L называют замкнутым контуром L (рис. 3). Обычно задаются направлением обхода контура L по ходу часовой стрелки. Направление элементарного вектора перемещения  совпадает с направлением обхода контура L. В этом случае формула (5) утверждает: циркуляция вектора по замкнутому контуру L равна нулю.
совпадает с направлением обхода контура L. В этом случае формула (5) утверждает: циркуляция вектора по замкнутому контуру L равна нулю.
Следует отметить, что силы тяготения и упругости являются консервативными, а силы трения неконсервативными. В самом деле, поскольку сила трения направлена в сторону, противоположную перемещению или скорости, то работа сил трения по замкнутому пути всегда отрицательна и, следовательно, не равна нулю.
 Если на материальную точку действует консервативная сила, то можно ввести скалярную функцию координат точки
Если на материальную точку действует консервативная сила, то можно ввести скалярную функцию координат точки  , называемую потенциальной энергией.
, называемую потенциальной энергией.
Потенциальную энергию определим следующим образом
 , (6)
, (6)
где С – произвольная постоянная, а  – работа консервативной силы при перемещении материальной точки из положения
– работа консервативной силы при перемещении материальной точки из положения  в фиксированное положение
в фиксированное положение  . Образуем разность значений потенциальной энергии для точек 1 и 2 (см. рис. 4) и воспользуемся тем, что
. Образуем разность значений потенциальной энергии для точек 1 и 2 (см. рис. 4) и воспользуемся тем, что 
 .
.
Правая часть, полученного соотношения, дает работу, совершаемую на пути из точки 1
|

|

 в точку 2, проходящем через точку О; Вследствие независимости работы от формы пути такая же работа А совершается на любом другом пути, т.е.
в точку 2, проходящем через точку О; Вследствие независимости работы от формы пути такая же работа А совершается на любом другом пути, т.е.
|
 . (7)
. (7)
|
Потенциальная энергия определяется с точностью до постоянной. Однако, это не имеет существенного значения, поскольку во все физические соотношения входит либо разность значений потенциальной энергии, либо ее производная по координатам.
Рассмотрим систему, состоящую из многих материальных точек. Если задано положение каждой материальной точки, то этим определено и положение всей системы или ее конфигурация. Если силы, действующие на материальные точки системы, зависят только от конфигурации системы (т.е. только от координат материальных точек) и сумма работ этих сил при перемещении системы из одного положения в другое не зависит от пути перехода, а определяется только начальной и конечной конфигурациями системы, то такие силы называются консервативными. В этом случае для системы материальных точек также можно ввести понятие потенциальной энергии системы, обладающей свойством (7):  , (8)
, (8)
где  - полная работа консервативных сил, действующих на материальные точки системы при переходе ее из конфигурации 1 в конфигурацию 2;
- полная работа консервативных сил, действующих на материальные точки системы при переходе ее из конфигурации 1 в конфигурацию 2;  и
и  - значения потенциальной энергии системы в этих конфигурациях.
- значения потенциальной энергии системы в этих конфигурациях.
Связь между силой, действующей на тело в данной точке поля, и его потенциальной энергией определяется по следующим формулам:
 (9)
(9)
или  , (10)
, (10)
где  – называется градиентом скалярной функции
– называется градиентом скалярной функции  ;
;  – единичные векторы координатных осей;
– единичные векторы координатных осей;
 . (11)
. (11)
Часто формулу (9) записывают также в виде  , где
, где  – оператор набла, определяемый по формуле (11).
– оператор набла, определяемый по формуле (11).
Обозначим через х растяжение пружины, т.е. разность длин пружины в деформированном и недеформированном состояниях.
При возвращении пружины из деформированного состояния в недеформированное сила совершает работу.
 . (12)
. (12)
Таким образом, потенциальная энергия упруго деформированной пружины
 . (13)
. (13)
На рис. 5 изображены две материальные точки массы m 1 и m 2. Положение их характеризуется радиусами-векторами  и
и  соответственно. Элементарная работа, совершаемая силами гравитационного притяжения этих точек
соответственно. Элементарная работа, совершаемая силами гравитационного притяжения этих точек  , где
, где  – сила, действующая на первую материальную точку со стороны второй, а
– сила, действующая на первую материальную точку со стороны второй, а  – сила, действующая на вторую
– сила, действующая на вторую  материальную точку со стороны первой; согласно 3-му закону Ньютона
материальную точку со стороны первой; согласно 3-му закону Ньютона  =-
=- ;
;  и
и  – элементарные перемещения материальных точек. С учетом этого
– элементарные перемещения материальных точек. С учетом этого  , где
, где  . Учитывая, что и противоположно направлены и что величина
. Учитывая, что и противоположно направлены и что величина  , находим
, находим  . Полная работа
. Полная работа
 , (14)
, (14)
где R 1 и R2 – начальное и конечное расстояние между материальными точками.
Эта работа равна изменению потенциальной энергии A=Wn1 -Wn2. Учитывая (14), находим, что потенциальная энергия гравитационного притяжения двух материальных точек
 или
или  (15)
(15)
где R или r – расстояние между материальными точками.
Формула (15) справедлива также для однородных сферических тел; в этом случае r – расстояние между центрами масс таких тел. В частности, потенциальная энергия тела массы т, находящегося в поле гравитации Земли, масса которой М,
 (16)
(16)
Изменение потенциальной энергии тела массы m, поднятого с поверхности Земли (r = R, где R – радиус Земли) на высоту h (r = R + h), согласно (16), равно:
 (17)
(17)
Если h<<R, то в знаменателе формулы (17) можно пренебречь слагаемым h и она перейдет в известную формулу
 или
или  , (18)
, (18)
если потенциальную энергию на поверхности Земли принять равной нулю,где  – ускорение силы тяжести на поверхности Земли. Таким образом, формула (18) была получена в предположении, что сила тяжести (и ускорение силы тяжести) не изменяются с высотой h, т.е. поле силы тяжести Земли однородно. Поэтому формула (18) является приближенной формулой, в отличие от строгой формулы (16).
– ускорение силы тяжести на поверхности Земли. Таким образом, формула (18) была получена в предположении, что сила тяжести (и ускорение силы тяжести) не изменяются с высотой h, т.е. поле силы тяжести Земли однородно. Поэтому формула (18) является приближенной формулой, в отличие от строгой формулы (16).
Напишем уравнение движения материальной точки (частицы) массы m, движущейся под действием сил, результирующая которых равна :  .
.
Умножим скалярно правую и левую часть этого равенства на элементарное перемещение точки  , тогда
, тогда
 . (1)
. (1)
Так как  , то легко показать, что
, то легко показать, что  Используя последнее равенство и то обстоятельство, что масса материальной точки постоянная величина, преобразуем (1) к виду
Используя последнее равенство и то обстоятельство, что масса материальной точки постоянная величина, преобразуем (1) к виду  .
.
Проинтегрировав части этого равенства вдоль траектории частицы от точки 1 до точки 2, имеем:
 .
.
Согласно определению первообразной и формуле (4.3) для работы переменной силы, получим соотношение:  .
.
Величина
 (2)
(2)
называется кинетической энергией материальной точки.
Таким образом мы приходим к формуле
 , (3)
, (3)
из которой следует, что работа результирующей всех сил, действующих на материальную точку, расходуется на приращение кинетической энергии этой частицы.
Полученный результат без труда обобщается на случай произвольной системы материальных точек.
Кинетической энергией системы называется сумма кинетических энергий материальных точек, из которых эта система состоит или на которые ее можно мысленно разделить:  .
.
Напишем соотношение (3) для каждой материальной точки системы, а затем все такие соотношения сложим. В результате снова получим формулу, аналогичную (3), но для системы материальных точек.
, (4)
где  и
и  – кинетические энергии системы, а под необходимо понимать сумму работ всех сил, действующих на материальные точки системы.
– кинетические энергии системы, а под необходимо понимать сумму работ всех сил, действующих на материальные точки системы.
Таким образом мы доказали теорему (4): работа всех сил, действующих на систему материальных точек, равна приращению кинетической энергии этой системы.
Рассмотрим систему из n материальных точек, на которые действуют как консервативные так и неконсервативные силы. Найдем работу, которую совершают эти силы при перемещении системы из одной конфигурации в другую. Работа консервативных сил может быть представлена как убыль потенциальной энергии системы [(см. 4.8)]:
 .
.
Работу неконсервативных сил обозначим посредством А *. Согласно (4) суммарная работа всех сил затрачивается на приращение кинетической энергии системы  , следовательно,
, следовательно,  или
или
 .
.
Сумма кинетической и потенциальной энергии представляет собой полную механическую энергию Е системы:
 . (5)
. (5)
Таким образом
 . (6)
. (6)
Очевидно, что если неконсервативные силы в системе отсутствуют, т.е.  , то ее полная механическая энергия остается постоянной (сохраняется) т.е. Е = const. Эту теорему называют законом сохранения механической энергии, он утверждает: полная механическая энергия системы материальных точек, находящихся под действием консервативных сил остается постоянной.
, то ее полная механическая энергия остается постоянной (сохраняется) т.е. Е = const. Эту теорему называют законом сохранения механической энергии, он утверждает: полная механическая энергия системы материальных точек, находящихся под действием консервативных сил остается постоянной.
В такой системе могут происходить лишь превращения потенциальной энергии в кинетическую и обратно, но полный запас энергии системы измениться не может. При наличии неконсервативных сил (например, сил трения, сил сопротивления...) механическая энергия системы не сохраняется, она уменьшается, что приводит к ее нагреванию. Такой процесс называется диссипацией (рассеянием) энергии. Силы, приводящие к диссипации энергии, называются диссипативными.
При соударении тел они в большей либо меньшей мере деформируются. При этом кинетическая энергия тел частично или полностью переходит в потенциальную энергию упругой деформации и во внутреннюю энергию тел. Увеличение внутренней энергии приводит к нагреванию тел.
Ограничимся рассмотрением центрального удара двух шаров, при котором шары движутся вдоль прямой, проходящей через их центры. На рис. 1 изображены два возможных случая центрального удара.
 Рассмотрим два предельных вида соударения – абсолютно неупругий и абсолютно упругий удары.
Рассмотрим два предельных вида соударения – абсолютно неупругий и абсолютно упругий удары.
Интересным примером, где имеет место потеря механической энергии под действием диссипативных сил, является абсолютно неупругий удар, при котором потенциальная энергия упругой деформации не возникает; кинетическая энергия тел частично или полностью превращается во внутреннюю энергию. После такого удара тела движутся с одинаковыми скоростями (т.е. как одно тело) либо покоятся.
При абсолютно неупругом ударе выполняется только закон сохранения суммарного импульса тел:  , откуда,
, откуда,
 . (7)
. (7)
Кинетическая же энергия, которой обладала система до удара, после соударения уменьшается или стремится к нулю. Изменение кинетической энергии:
 .(8)
.(8)
Это такой удар, при котором полная механическая энергия тел сохраняется. Сначала кинетическая энергия частично или полностью переходит в потенциальную энергию упругой деформации. Затем тела возвращаются к первоначальной форме, отталкиваясь друг от друга. В итоге потенциальная энергия упругой деформации снова переходит в кинетическую и тела разлетаются со скоростями, которые определяются исходя их законов сохранения суммарного импульса и суммарной энергии тел.
Обозначим массы шаров m 1 и m 2, скорости шаров до удара  и
и  , скорости шаров после удара
, скорости шаров после удара  и
и  и напишем уравнения сохранения импульса и энергии:
и напишем уравнения сохранения импульса и энергии:
 (9)
(9)
Решая совместно эти два уравнения, найдем скорости шаров после абсолютно упругого удара:
 (10)
(10)
Чтобы осуществить расчеты, нужно спроектировать все векторы на ось х. Сделаем это, например, для случая а) на рис. 1:
 . (11)
. (11)
Если ответ получается положительным, то это означает, что шар после соударения движется вправо, если – отрицательный, то шар движется влево.
Классическая механика учитывает только кинетическую энергию макроскопического движения тел и их макроскопических частей, а также их потенциальную энергию. Но она полностью отвлекается от внутреннего атомистического строения вещества. При ударе, трении и аналогичных процессах кинетическая энергия видимого движения тел не пропадает. Она только переходит в кинетическую энергию невидимого беспорядочного движения атомов и молекул вещества, а также в потенциальную энергию их взаимодействия. Эта часть энергии получила название внутренней энергии.
Беспорядочное движение атомов и молекул воспринимается нашими органами чувств в виде тепла.
Таково физическое объяснение кажущейся потери механической энергии при ударе, трении и пр.
В физике закон сохранения энергии распространяют не только на явления, рассматриваемые в механике, но на все без исключения процессы, происходящие в природе.
Полное количество энергии в изолированной системе тел и полей всегда остается постоянным; энергия лишь может переходить из одной формы в другую.
В основе закона сохранения энергии лежит такое свойство времени как однородность, т.е. равнозначность всех моментов времени, заключающаяся в том, что замена момента времени t 1 моментом времени t 2, без изменения значений координат и скоростей тел не изменяет механических свойств системы. Поведение системы, начиная с момента времени t 2 будет таким же, каким оно было бы, начиная с момента t 1.
Лекция № 9.
Абсолютно твеpдым телом называется тело, дефоpмациями котоpого по условиям задачи можно пpенебpечь. У абсолютно твеpдого тела pасстояние между любыми его точками с течением вpемени не меняется. В теpмодинамическом смысле такое тело не обязательно должно быть твеpдым. Напpимеp, легкий pезиновый шаpик, наполненный водоpодом, можно pассматpивать как абсолютно твеpдое тело, если нас интеpесует его движение в атмосфеpе. Положение абсолютно твеpдого тела в пpостpанстве хаpактеpизуется шестью кооpдинатами. Это видно из следующих сообpажений. Положение абсолютно твеpдого тела полностью фиксиpуется заданием тpех точек, жестко связанных с телом. Положение тpех точек задается девятью кооpдинатами, но поскольку pасстояния между точками неизменны, то эти девять кооpдинат будут связаны тpемя уpавнениями. Следовательно, независимых кооpдинат, опpеделяющих положение твеpдого тела в пpостpанстве, останется шесть. Числу независимых кооpдинат соответствует число независимых видов движения, на котоpые может быть pазложено пpоизвольное движение тела. У абсолютно твердого тела таких движений шесть. Говоpят, что абсолютно твеpдое тело обладает шестью степенями свободы. Независимые виды движения тела можно выбpать по-pазному. Напpимеp, поступим следующим обpазом. Свяжем с твеpдым телом "жестко" одну точку и будем следить за ее движением и за движением тела вокpуг этой точки. Движение одной точки описывается тpемя кооpдинатами, т.е включает в себя тpи степени свободы. Их называют поступательными степенями свободы. Тpи дpугие степени свободы пpиходятся на вpащательное движение тела вокpуг выбpанной точки. Соответствующие степени свободы называются вpащательными.
Таким обpазом, пpоизвольное движение твеpдого тела может быть pазбито на поступательное и вpащательное вокpуг неподвижной точки. Ниже мы pассмотpим поступательное движение твеpдого тела и его вpащательное движение вокpуг неподвижной оси.
Поступательным движением тела называется такое движение, пpи котоpом любая пpямая, жестко связанная с телом, пеpемещается паpаллельно самой себе.
Пpимеpом такого движения может служить движение велосипедной педали пpи движении велосипедиста. Пpи поступательном движении все точки тела движутся совеpшенно одинаково: у них одинаковые, но смещенные относительно дpуг дpуга тpаектоpии, одинаковые в любой момент вpемени скоpости, одинаковые ускоpения. Если так, то поступательное движение абсолютно твеpдого тела эквивалентно движению одной точки и кинематика поступательного движения сводится к кинематике точки.
Вpащательное движение тела вокpуг неподвижной оси.
Положение абсолютно твеpдого тела в этом случае хаpактеpизуется одной единственной кооpдинатой: углом повоpота тела вокpуг оси. Угол отсчитывается от некотоpого положения тела в опpеделенную стоpону, в pезультате этого углу повоpота пpиписывается знак (pис. 1.5).
Важнейшей хаpактеpистикой движения тела в этом случае является угловая скоpость. Угловой скоpостью тела называется пеpвая пpоизводная от угла повоpота по вpемени:

(1.)
Угловая скоpость показывает, на какой угол повоpачивается тело в секунду.
Угловая скоpость хаpактеpизуется знаком. Она меньше нуля, если угол меняется в напpавлении, обpатном положительному напpавлению его отсчета.
Если тело вpащается в одну стоpону, то его движение иногда описываетсячислом обоpотов N. Число обоpотов N связано с углом повоpота фоpмулой

(2)
В этом случае вместо угловой скоpости вводят понятие частоты вpащения (число обоpотов в секунду). Частота вpащения pавна пеpвой пpоизводной от числа обоpотов по вpемени, т. е.
(3)
Если вpащение pавномеpное, то угловую скоpость можно опpеделить известной фоpмулой:

(4)
Но эта фоpмула невеpна, если вpащение ускоpенное и угловая скоpость изменяется во вpемени.
Угловым ускоpением называется пеpвая пpоизводная угловой скоpости по вpемени (или втоpая пpоизводная от угла повоpота по вpемени).
(5)
Вpащение является ускоpенным (с наpастающей угловой скоpостью), если знаки угловой скоpости и углового ускоpения одинаковы, и замедленным, если знаки угловой скоpости и углового ускоpения pазные.
Пpи вpащении твеpдого тела вокpуг неподвижной оси все точки тела движутся по окpужностям с центpами, pасположенными на оси вpащения. Линейные величины для точек вpащающегося твеpдого тела связаны с угловыми, т.к. во все фоpмулы этих соотношений будет входить pадиус вpащения точки.
Спpаведливы следующие соотношения:

(6)
Между движением твеpдого тела вокpуг неподвижной оси и движением отдельной матеpиальной точки (или поступательным движением тела) существует тесная и далеко идущая аналогия. Пpи pешении задач полезно пользоваться этой аналогией. Каждой линейной величине из кинематики точки соответствует подобная величина из кинематики вpащения твеpдого тела. Кооpдинате s соответствует угол, линейной скоpости v - угловая скоpость, линейному (касательному) ускоpению а - угловое ускоpение.
Пpиведем пpимеp того, как можно пользоваться аналогией между поступательным и вpащательным движениями. Известно, что pавноускоpенное движение описывается фоpмулами:
(7)
По аналогии можно записать соответствующие фоpмулы для pавноускоpенного вpащения твеpдого тела:
(8)
Аналогия между поступательным и вpащательным движениями существует и в динамике.
Движение абсолютно твердого тела можно рассматривать как движение системы большого числа материальных точек, сохраняющих неизменное положение друг относительно друга. Для каждой материальной точки справедлив второй закон динамики. Если масса  -й точки
-й точки  і скорость её
і скорость её  , то
, то
 , (9)
, (9)
где  — внутренние силы, действующие на данную точку со стороны других точек тела, а
— внутренние силы, действующие на данную точку со стороны других точек тела, а  — действующие на неё внешние силы.
— действующие на неё внешние силы.
Напишем уравнения, аналогичные уравнению (1), для каждой точки и просуммируем их. Так как  , то
, то
 , (10)
, (10)
или
 , (11)
, (11)
т.е. производная от полного количества движения тела равна сумме внешних сил, действующих на тело.
Равенство (2) можно записать в виде
 . (12)
. (12)
Если тело движется только поступательно, то ускорения всех его точек одинаковы и, учитывая, что  (масса тела), получим
(масса тела), получим
 , (13)
, (13)
где
 .
.
Уравнение (5) носит название уравнения поступательного движения твердого тела.
Линия, соединяющая точки тела, которые в данный момент остаются в покое, называется мгновенной осью вращения. Качение может быть представлено как вращение вокруг мгновенных осей вращения. Мгновенная ось вращения перемещается по боковой поверхности цилиндра со скоростью, равной скорости поступательного движения его оси.
Рассмотрим движение шарика массой  , укрепленного на легкой нити, по окружности радиуса
, укрепленного на легкой нити, по окружности радиуса  в вертикальной плоскости. При длине нити, значительно большей радиуса шарика, его можно рассматривать как материальную точку.
в вертикальной плоскости. При длине нити, значительно большей радиуса шарика, его можно рассматривать как материальную точку.
Шарик движется под действием двух сил: силы упругости, действующей со стороны деформированной нити, и силы тяжести. Первая направлена все время вдоль радиуса окружности, а вторая составляет с ним переменный угол. Направление и величина результирующей этих сил меняется во время движения, поэтому меняется ускорение, с которым движется шарик.
Рассмотрим движение шарика на малом участке окружности, в пределах которого силу можно считать постоянной по величине и направлению. Обозначим угол между результирующей сил, действующей на шарик, и направлением касательной к траектории через  (рис.1).
(рис.1).
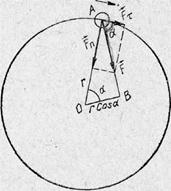
рис №1. Обращение точки по окружности под действием силы  .
.
Шарик приобретает тангенциальное ускорение  под действием тангенциальной составляющей силы , равной
под действием тангенциальной составляющей силы , равной
 .
.
По второму закону динамики
 .
.
Как известно, угловое ускорение  и, следовательно,
и, следовательно,
 . (14)
. (14)
Умножая обе части равенства на , получим:
 (15)
(15)
Слева в равенстве стоит величина, которая носит название момента силы относительно центра вращения.
Момент силы М относительно центра вращения численно равен произведению силы на длину перпендикуляра, опущенного из центра вращения на направление силы. Величина  называется плечом. Поэтому иногда момент силы определяют как произведение силы на плечо.
называется плечом. Поэтому иногда момент силы определяют как произведение силы на плечо.
Величина  называется моментом инерции.
называется моментом инерции.
Момент инерции  материальной точки относительно центра вращения численно равен произведению массы точки на квадрат её расстояния от центра вращения.
материальной точки относительно центра вращения численно равен произведению массы точки на квадрат её расстояния от центра вращения.
Таким образом,  (16)
(16)
Равенство свидетельствует о том, что инерциальные свойства материальной точки при движении по окружности определяет не только величина массы точки, но и её положение относительно центра вращения. Угловое ускорение — величина векторная, момент инерции — величина скалярная. Следовательно, момент силы — величина векторная и совпадает по направлению с вектором углового ускорения.
Положим, твердое тело может без трения вращаться вокруг неподвижной оси ОО
(рис №2).
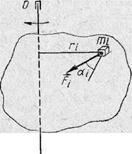
рис.№2. Тело, вращающееся вокруг неподвижной оси.
Пусть к телу приложена результирующая внешних сил  . Кроме неё на тело действуют силы реакции со стороны связей (подшипников). Если силы трения отсутствуют, то силы реакции связей проходят через ось вращения и момент их относительно оси равен нулю. Подсчитаем момент равнодействующей внешних сил относительно оси вращения.
. Кроме неё на тело действуют силы реакции со стороны связей (подшипников). Если силы трения отсутствуют, то силы реакции связей проходят через ось вращения и момент их относительно оси равен нулю. Подсчитаем момент равнодействующей внешних сил относительно оси вращения.
Для этого расчленим тело на достаточно малые элементы, чтобы расстояния от всех точек отдельного элемента до оси можно было считать одинаковым. Пусть масса элемента —, внешняя сила, действующая на него, —  , угол между направлением силы и касательной к траектории элемента —
, угол между направлением силы и касательной к траектории элемента — .Положим (для определенности), что угол острый. При вращении тела каждый его элемент описывает окружность с центром на оси вращения. Для каждого элемента можно написать равенство вида (14):
.Положим (для определенности), что угол острый. При вращении тела каждый его элемент описывает окружность с центром на оси вращения. Для каждого элемента можно написать равенство вида (14):
 ,
,
где  — угловое ускорение элемента с массой
— угловое ускорение элемента с массой  .
.
Просуммируем равенства по всем элементам:
 .
.
Так как для абсолютно твердого тела угловое ускорение всех элементов одно и то же, то
Слева в равенстве стоит сумма моментов сил, действующих на все элементы тела. В теоретической механике доказывается теорема о том, что моменты суммы сил относительно какой-либо оси равен алгебраической сумме моментов этих сил относительно той же оси (теорема Вариньона).
Следовательно, слева в равенстве стоит величина вектора полного момента  сил, действующих на тело, относительно той же оси вращения.
сил, действующих на тело, относительно той же оси вращения.
Величина  равна сумме моментов инерции отдельных элементов относительно оси вращения и называется моментом инерции тела относительно оси.
равна сумме моментов инерции отдельных элементов относительно оси вращения и называется моментом инерции тела относительно оси.
Таким образом, основное уравнение вращательного движения тела можно записать в виде
 .
.
Так как векторы всех моментов сил, действующих на элементы тела, откладываются на одной оси, то вектор полного момента сил также лежит на этой оси и связан с напрвлением результирующей силы правилом буравчика.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1607; Нарушение авторских прав?; Мы поможем в написании вашей работы!