КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Адаптивный ПИ-регулятор с настройкой по АФХ разомкнутой системы
|
|
|
|
Адаптивный ПИД-регулятор с частотным разделением каналов управления и самонастройки
В работе автора / 12 / предложен новый принцип построения адаптивных систем управления с частотным разделением каналов управления и самонастройки. В таких системах осуществляется непрерывный процесс подстройки параметров регулятора под изменяющиеся свойства объекта управления при минимальной величине пробного гармонического сигнала.
Согласно предложенному принципу разделение каналов осуществляется путем включения заграждающего (режекторного) фильтра в обратную связь основного контура управления. Заграждающий фильтр разрывает цепь обратной связи на частоте критических колебаний объекта, что позволяет использовать метод Зиглера - Никольса / 14 / для расчета настроек регулятора.
Структурная схема системы управления с адаптивным ПИД- регулятором приведена на рис. 6.1.
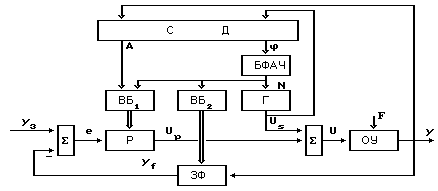
Рис. 6.1. Структурная схема системы управления с адаптивным
ПИД- регулятором.
Отслеживание критической частоты объекта, на которой фазовый сдвиг между входом и выходом равен -3,14 рад, осуществляется блоком фазовой автоподстройки частоты (БФАЧ). Блок изменяет частоту генератора синусоидальных колебаний (Г) таким образом, чтобы обеспечить этот фазовый сдвиг между входом и выходом. С помощью блока синхронного детектирования (СД) осуществляется выделение установившихся значений амплитуды и фазы пробных колебаний в выходном сигнале У объекта управления (ОУ). Первый и второй вычислительные блоки (ВБ 1,2) производят расчет настроек ПИД-регулятора и коэффициентов заграждающего фильтра.
Включение заграждающего фильтра последовательно с объектом приводит к сдвигу критической частоты колебаний и изменению коэффициента усиления системы ОУ+ЗФ, что иллюстрируется графиками рис.6.2.
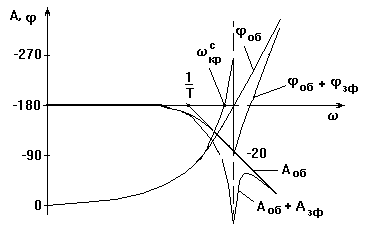
Рис. 6.2. Влияние заграждающего фильтра на ЛАХ и ЛФХ объекта.
Такое негативное влияние динамики заграждающего фильтра на запасы устойчивости в системе должно быть учтено при расчете настроек регулятора, если предполагается непрерывная работа контура адаптации. Экспериментально было установлено, что для объекта первого порядка с запаздыванием формулы Зиглера - Никольса для расчета настроек регулятора в вычислительном блоке ВБ1 должны быть скорректированы следующим образом
 (6.1)
(6.1)
где 1.3 - коэффициент коррекции, Акр, Ткр - амплитуда и период критических колебаний собственно объекта управления, автоматически определяемые контуром адаптации. Заметим, что для объекта второго порядка с запаздыванием вместо коэффициента 1.3 в формуле для вычисления величины Кр необходимо взять значение 1.6, так как происходит большее увеличение усиления объекта при смещении влево его критической частоты колебаний. Однако оптимальность полученных настроек не гарантируется для объектов с большим запаздыванием. Это связано с тем, что формулы Зиглера-Никольса носят эмпирический характер и рассчитаны на объекты с отношением t / Т от 0 до 0,3.
Рассмотрим алгоритмы работы основных блоков адаптивной системы управления. Основу системы составляет цифровой ПИД-регулятор. Уравнение динамики регулятора в координатах вход - выход описывается уравнением (3.4). Коэффициенты этого регулятора пересчитываются через параметры настройки непрерывного ПИД-регулятора, которые определяются вычислительным блоком ВБ1 по формулам (6.1).
Частотное разделение каналов управления и самонастройки осуществляется путем включения точно настроенного на частоту пробных колебаний заграждающего фильтра в главный контур системы, что позволяет исключить влияние регулятора на гармоническую составляющую выходного сигнала объекта управления, подаваемых на его вход. Это обеспечивает быстрое отслеживание критической частоты колебаний объекта. Уравнение динамики цифрового заграждающего фильтра второго порядка в координатах вход - выход имеет вид
 ,(6.2)
,(6.2)
где  - сигнал на входе фильтра,
- сигнал на входе фильтра, - сигнал на его выходе,
- сигнал на его выходе,  - коэффициенты ЗФ, расчет которых осуществляется в вычислительном блоке ВБ2 по формулам / 13 /
- коэффициенты ЗФ, расчет которых осуществляется в вычислительном блоке ВБ2 по формулам / 13 /


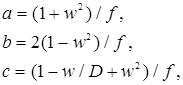
где  - добротность заграждающего фильтра,
- добротность заграждающего фильтра,  - нормированный период пробных колебаний, равный отношению периода пробных колебаний к величине периода квантования. Величину добротности заграждающего фильтра рекомендуется выбирается в диапазоне 2¸10. Причём чем больше значение , тем меньше влияние заграждающего фильтра на динамику системы, но при этом уменьшается скорость затухания пробной составляющей в заграждающем фильтре, что приводит к увеличению времени самонастройки в системе.
- нормированный период пробных колебаний, равный отношению периода пробных колебаний к величине периода квантования. Величину добротности заграждающего фильтра рекомендуется выбирается в диапазоне 2¸10. Причём чем больше значение , тем меньше влияние заграждающего фильтра на динамику системы, но при этом уменьшается скорость затухания пробной составляющей в заграждающем фильтре, что приводит к увеличению времени самонастройки в системе.
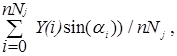
Рассмотрим алгоритм работы блока синхронного детектирования. Его задача состоит в определение текущего значения амплитуды и фазы пробных колебаний в выходном сигнале объекта. Это осуществляется через вычисление синусной  и косинусной
и косинусной  составляющих вектора АФХ объекта на текущей (
составляющих вектора АФХ объекта на текущей ( -той) частоте пробных колебаний. Для каждого значения нормированного периода колебаний
-той) частоте пробных колебаний. Для каждого значения нормированного периода колебаний  эти составляющие вычисляются по формулам
эти составляющие вычисляются по формулам
| 0.1) |

 =(
=(

| 0.2) |
 =(
=(
где  -значение сигнала на входе синхронного детектора в
-значение сигнала на входе синхронного детектора в  -момент квантования,
-момент квантования,  - число анализируемых (усредняемых) периодов пробных колебаний Дискретный аргумент тригонометрических функций изменяется в диапазоне от 0 до
- число анализируемых (усредняемых) периодов пробных колебаний Дискретный аргумент тригонометрических функций изменяется в диапазоне от 0 до  и вычисляется по формуле
и вычисляется по формуле  .
.
Текущие значения амплитуды и фазы пробных колебаний определяются по формулам / 11 /
 ,
,
| 0.3) |
 .
.
| 0.4) |
Учитывая, что почти все промышленные объекты управления вносят отрицательные фазовые сдвиги с увеличением частоты пробных колебаний, производится уточнение текущего значение фазы по условиям:
если < 0, то  ,
,
если ³ 0 и ³ 0, то  .
.
Для уменьшения дисперсии оценок амплитуды и фазы в блоке СД используется фильтр скользящего среднего по 2 - 5 текущим значениям величин  и
и  . Выходными величинами этих фильтров являются переменные
. Выходными величинами этих фильтров являются переменные  и
и  , приведенные на рис.6.1.
, приведенные на рис.6.1.
Для оценки установившихся значений амплитуды и фазы в блоке СД измеряются также величины их на каждом анализируемом интервале
Если эти величины находятся в определенном поле допуска, то логический блок разрешает работу вычислительных блоков ВБ1 и ВБ2.
Блок фазовой автоподстройки частоты БФАЧ, работая по интегральному закону управления, изменяет нормированный период колебаний цифрового генератора синусоидальных колебаний таким образом, чтобы поддерживать текущий фазовый сдвиг на заданном уровне  , используя закон регулирования:
, используя закон регулирования:
 ,
,
где коэффициент усиления закона регулирования  =0,5...1,5.
=0,5...1,5.
При этом, под значением  понимается установившееся значение фазового сдвига на -м периоде пробных колебаний.
понимается установившееся значение фазового сдвига на -м периоде пробных колебаний.
На рис 6.3 показаны графики процессов самонастройки в рассматриваемой адаптивной системе управления, полученные путем моделирования ее динамики на ЭВМ. В качестве модели объекта управления бралась передаточная функция, состоящая из трех последовательно включенных инерционных звеньев с постоянными времени 59 с, 100 с, 257 с и звена запаздывания в 30 с. Коэффициент усиления объекта был равен 1. Период квантования был принят равным 20 с. На рис. 6.3 обозначены: U, Y,-графики входного и выходного сигналов объекта, N, Q, M - графики нормированного периода, фазы и амплитуды пробных колебаний в выходном сигнале Y. Установившиеся значения параметров настройки приведены на графике. В момент времени  процесс самонастройки прекращался и на систему подавались скачки по сигналам возмущения и задания. Видно, что полученные настройки ПИ-регулятора обеспечивают высокое качество отработки этих сигналов. Время выхода на первые настройки составило 140 минут.
процесс самонастройки прекращался и на систему подавались скачки по сигналам возмущения и задания. Видно, что полученные настройки ПИ-регулятора обеспечивают высокое качество отработки этих сигналов. Время выхода на первые настройки составило 140 минут.
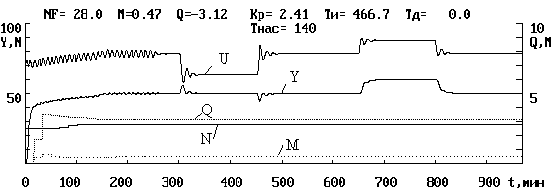
Рис. 6.3. Графики процессов самонастройки.
Для квазистационарных объектов управления можно лишь периодически включать контур самонастройки. Периодичность включения контура будет определяться скоростью дрейфа параметров объекта. Для нестацонарных объектов необходима непрерывная работа контура адаптации и расчёт настроек регулятора по скорректированным формулам Циглера-Никольса.
В работе / 11 / показано, что при оптимальных по точности (в смысле минимума средне-квадратичной ошибки регулирования) настройках ПИ-регулятора для различных типов объектов управления годографы АФХ их разомкнутых систем будут проходить через одну общую точку в которой длина вектора АФХ  , а угол
, а угол  рад. Ниже показана возможность построения оптимальной по точности системы регулирования путем использования принципа частотного разделения каналов управления и самонастройки. Для решения этой задачи предлагается включить заграждающий фильтр за ПИ-регулятором, что обеспечивает разрыв контура главной обратной связи и дает возможность контролировать положение вектора АФХ разомкнутой системы.
рад. Ниже показана возможность построения оптимальной по точности системы регулирования путем использования принципа частотного разделения каналов управления и самонастройки. Для решения этой задачи предлагается включить заграждающий фильтр за ПИ-регулятором, что обеспечивает разрыв контура главной обратной связи и дает возможность контролировать положение вектора АФХ разомкнутой системы.
На рис. 6.4 изображена структурная схема адаптивной системы управления, с настройкой по одной точке амплитудно-фазовой характеристики разомкнутой системы. На этой схеме приняты те же обозначения блоков и сигналов, что и на рис. 6.1.
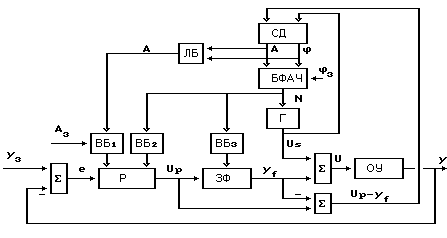
Рис. 6.4. Структурная схема адаптивной системы управления
Вновь введенный вычислительный блок ВБ 2 осуществляет пересчет постоянной интегрирования регулятора при смене нормированного периода колебаний по формуле / 11 /
 ,
,
где  - нормированное, по периоду квантования, значение постоянной интегрирования.
- нормированное, по периоду квантования, значение постоянной интегрирования.
Логический блок ЛБ определяет момент достижения установившемся значением фазового сдвига величины  рад., разрешая работу вычислительного блока ВБ1, который производит расчет коэффициента усиления регулятора, обеспечивающего заданный модуль вектора разомкнутой системы
рад., разрешая работу вычислительного блока ВБ1, который производит расчет коэффициента усиления регулятора, обеспечивающего заданный модуль вектора разомкнутой системы
 ,
,
где  - оптимальный коэффициент усиления регулятора,
- оптимальный коэффициент усиления регулятора,  - начальное (текущее) значение коэффициента, обеспечивающее устойчивую работу системы в процессе самонастройки,
- начальное (текущее) значение коэффициента, обеспечивающее устойчивую работу системы в процессе самонастройки,  - заданная длина вектора разомкнутой системы, - длина вектора разомкнутой системы в момент достижения фазовым сдвигом значения -2,62 рад.
- заданная длина вектора разомкнутой системы, - длина вектора разомкнутой системы в момент достижения фазовым сдвигом значения -2,62 рад.
После расчета оптимального коэффициента усиления регулятора происходит отключение контура самонастройки, заграждающего фильтра и генератора синусоидальных колебаний.
На рис.6.5 показаны графики процессов самонастройки в рассматриваемой адаптивной системе управления, полученные путем моделирования ее динамики на ЭВМ. В качестве модели объекта управления бралась та же передаточная функция, что и ранее. Обозначения на этом рисунке соответствуют рис.6.3. Установившиеся значения параметров настройки приведены на графике. В момент времени  процесс самонастройки прекращался и на систему подавались скачки по сигналам возмущения и задания. Видно, что полученные настройки ПИ-регулятора обеспечивают еще более высокое качество отработки этих сигналов по сравнению с рис. 6.3. Однако время выхода на первые настройки больше, чем в предыдущем случае и составило.350 минут.
процесс самонастройки прекращался и на систему подавались скачки по сигналам возмущения и задания. Видно, что полученные настройки ПИ-регулятора обеспечивают еще более высокое качество отработки этих сигналов по сравнению с рис. 6.3. Однако время выхода на первые настройки больше, чем в предыдущем случае и составило.350 минут.
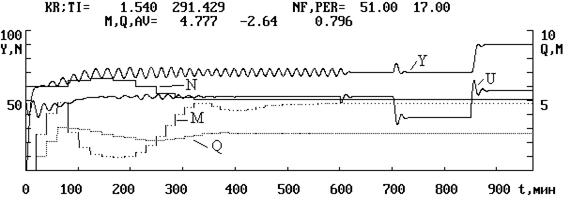 Рис.6.5. Графики процессов самонастройки.
Рис.6.5. Графики процессов самонастройки.
Главным достоинством предложенного алгоритма адаптации по сравнению с предыдущим можно считать возможность оптимальной по минимуму СКО настройки регулятора для различных видов передаточной функции объектов с запаздыванием при наличии шумов в канале измерения.
В то же время, работа системы на более низких частотах пробного сигнала, чем в предыдущем случае затрудняет организацию процедуры непрерывного отслеживания изменяющихся параметров объекта управления.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1493; Нарушение авторских прав?; Мы поможем в написании вашей работы!