КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синтез рычажных механизмов по коэффициенту изменения средней скорости выходного звена
|
|
|
|
Целью проектирования является создание (синтез) кинематической схемы механизма, которая обеспечит требуемый закон изменения кинематических параметров при минимальных размерах механизма иприемлемых динамических условиях работы.
В рычажных механизмах с периодическим циклом работы должна быть обеспечена проворачиваемость кривошипов (условие геометрической работоспособности).
Одним из условий силовой работоспособности механизма является условие передачи сил от ведущего звена к ведомому. Характер силового воздействия на звено определяют углом давления  - углом между вектором силы, действующей на ведомое звено (без учёта трения и ускорения движения масс), и вектором скорости точки её приложения. Для нормальной работы механизма угол давления в любом его положении не должен превышать максимально допустимого значения
- углом между вектором силы, действующей на ведомое звено (без учёта трения и ускорения движения масс), и вектором скорости точки её приложения. Для нормальной работы механизма угол давления в любом его положении не должен превышать максимально допустимого значения  :
:

Коэффициент изменения средней скорости исполнительного звена на рабочем и холостом ходу является показателем экономической эффективности работы механизма. Коэффициент характеризует степень использования рабочего времени машины по сравнению с непроизводительными затратами на холостой ход и выражается отношением средней скорости исполнительного звена на холостом ходу к средней его скорости на рабочем ходу:
 (1)
(1)
Чем больше этот коэффициент, тем эффективней использование рабочего времени механизма и меньше затраты времени на холостой ход.
На стадии проектирования кинематической схемы механизма можно обеспечить требуемый коэффициент изменения средней скорости исполнительного звена, связав его с геометрическими параметрамивзаиморасположения звеньев механизма и неподвижных кинематических пар.
В качестве примера построим кривошипно-коромысловый механизм в двух крайних положениях коромысла (рис.8.7). Эти положения получаются при условии, что отрезки, изображающие кривошип О 1 А и шатун АВ, располагаются на одной прямой линии. Коромысло О 2 В при переходе из одного крайнего положения в другое поворачивается на один и тот же угол размаха  , а кривошип О 1 А - на разные углы
, а кривошип О 1 А - на разные углы  (рабочий ход) и
(рабочий ход) и  (холостой ход).
(холостой ход).
Тогда коэффициент изменения средней скорости " k " можно выразить через угол  между крайними положениями шатуна следующим образом (рис.8.7):
между крайними положениями шатуна следующим образом (рис.8.7):
 .
.
Следовательно, обеспечивая при проектировании схемы механизма угол между крайними положениями звеньев, представляется возможным получить необходимый коэффициент " k " изменения средней скорости:
 (2)
(2)
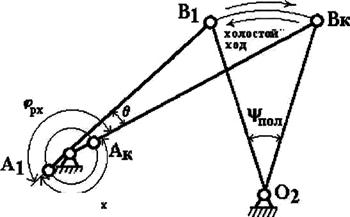
Рис. 8.7. Схема кривошипно-коромыслового механизма,
соответствующая крайним положениям исполнительного звена
Поэтому при постоянной скорости вращения кривошипа время перехода из одного крайнего положения в другое оказывается различным. Соответственно различной оказывается и средняя угловая скорость коромысла.
Проведем синтез наиболее часто встречающихся рычажных механизмов.
Кривошипно-коромысловый механизм. Заданы длина коромысла l 3, угол его размаха и коэффициент K. Строим крайние положения коромысла О 2 В (рис. 8.8).
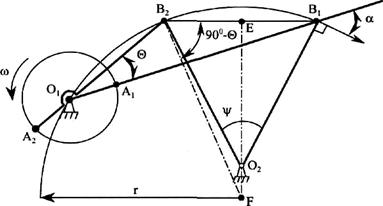
Рис. 8.8. Схема синтеза кривошипно-коромыслового механизма
Определяем угол между крайними положениями шатуна АВ:
 .
.
Из середины отрезка B 1 B 2 точки Е проводим прямую через центр качания коромысла (точка О 2). Строим  (
( ). Из точки F радиусом
). Из точки F радиусом  проводим дугу, которая будет геометрическим местом центров вращения кривошипа O 1. Зная максимально допустимый угол давления
проводим дугу, которая будет геометрическим местом центров вращения кривошипа O 1. Зная максимально допустимый угол давления  , определяем положение точки O 1 и строим крайние положения шатуна АВ.
, определяем положение точки O 1 и строим крайние положения шатуна АВ.
Длина кривошипа O 1 A  ;
;
Длина шатуна AB  .
.
Дезаксиальный кривошипно-ползунный механизм Задан ход ползуна S B и коэффициент К. Строим крайние положения ползуна B 1 и В 2 (рис. 8.9).
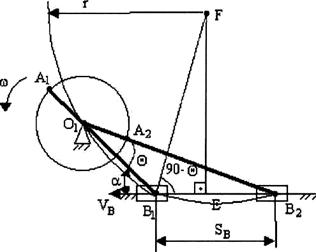
Рис.8.9. Схема синтеза кривошипно-ползунного механизма
Определяем угол между крайними положениями шатуна АВ:  .
.
Из середины отрезка B 1 B 2 точки Е проводим прямую и строим прямоугольный треугольник В 1 ЕF ( ). Из точки F радиусом проводим дугу, которая будет геометрическим местом центров вращения кривошипа О 1. Зная максимально допустимый угол давления , определяем положение точки О 1 и строим крайние положения шатуна АВ.
). Из точки F радиусом проводим дугу, которая будет геометрическим местом центров вращения кривошипа О 1. Зная максимально допустимый угол давления , определяем положение точки О 1 и строим крайние положения шатуна АВ.
Длина кривошипа О 1 А  ;
;
Длина шатуна 
 .
.
Аксиальный кривошипно-ползунный механизм. Задана средняя скорость ползуна V cp и частота вращения кривошипа n 1. Для аксиального (центрального) кривошипно-ползунного механизма (рис. 8.10) двойной ход ползуна соответствует одному обороту кривошипа:  .
.
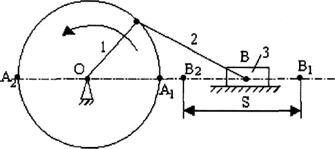
Рис. 8.10. Схема синтеза аксиального кривошипно-ползунного механизма
Средняя скорость точки В  , откуда длина кривошипа:
, откуда длина кривошипа:
 .
.
Задаваясь соотношением  (это соотношение меняется в пределах
(это соотношение меняется в пределах  ), определяем длину шатуна
), определяем длину шатуна  .
.
Механизм с качающейся кулисой. Заданы коэффициент К и ход исполнительного органа S B. Определяем угол размаха кулисы  .
.
Строим крайние положения кулисы О 2 В (рис. 8.11).
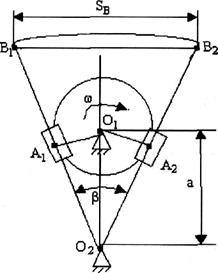
Рис. 8.11. Синтез механизма с качающейся кулисой
Вычисляем длину кулисы  .
.
В контур треугольника O 2 B 1 B 2 впишем траекторию точки А кривошипа таким образом, чтобы она не касалась линии B 1 B 2. Вычертим кулисные камни в крайних положениях и отметим межцентровые расстояния O 1 O 2 и длину кривошипа O 1 A 1.
Механизм с вращающейся кулисой. Заданы межцентровое расстояние O 1 O 2 и коэффициент К.
Определяем угол :  .
.
Строим положение центров вращения кулисы О 2 и кривошипа О 1 (рис. 8.12). Через точку О 2 проведём прямую, перпендикулярную к O 1 O 2. Определяем угол холостого хода  . Приняв точку O 1 за вершину, а отрезок O 1 O 2 за биссектрису, построим стороны угла
. Приняв точку O 1 за вершину, а отрезок O 1 O 2 за биссектрису, построим стороны угла  , при этом отрезок O 1 A 1= O 1 A 2 определит длину кривошипа.
, при этом отрезок O 1 A 1= O 1 A 2 определит длину кривошипа.
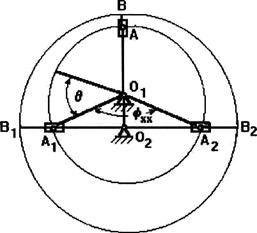
Рис. 8.12. Синтез механизма с вращающейся кулисой
Изобразим положение кулисы, когда стойка O 1 O 2 и кривошип O 1 A образуют прямую О 2 А. Участок кулисы АВ должен быть принят таким, чтобы исключить соскальзывание кулисного камня с кулисы в этомположении.
Механизм с качающимся ползуном. Заданы коэффициент К и межцентровое расстояние ОВ. Определяем угол между крайними положениями звена:  .
.
Изображаем положение точек О и В соответственно принятому отрезку для межцентрового расстояния (рис. 8.13).
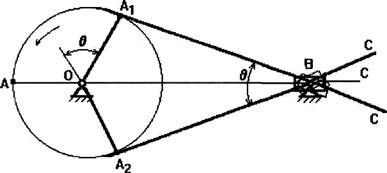
Рис. 8.13. Синтез механизма с качающимся ползуном
Приняв точку В за вершину, а отрезок ОВ - за биссектрису, построим угол между крайними положениями звена 2. Из точки О опустим перпендикуляры OA 1 и OA 2, которые изобразят кривошип, и опишемтраекторию точки А кривошипа.
Определим длину звеньев механизма с учётом крайних положений. Примем ВС =0,5 ОА в крайнем горизонтальном положении.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 3173; Нарушение авторских прав?; Мы поможем в написании вашей работы!