КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы управления СЭУ
|
|
|
|
1) Управление по возмущению
Рассмотрим семейство экстремальных характеристик:
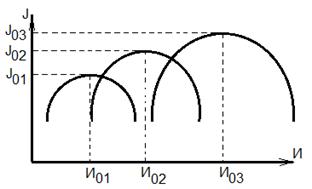
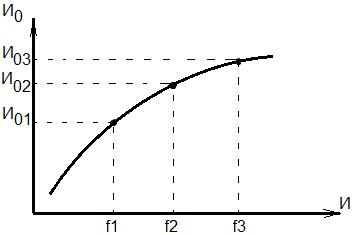
В случаях, когда возмущающее воздействие f можно измерить, допустимо использование некоторых компенсационных характеристик

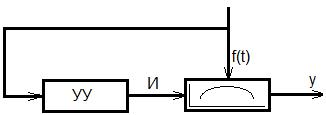
2) Принцип управления по отклонению
Для того, чтобы организовать управление, необходимо вычислить частную производную  и организовать воздействие на ОУ таким образом, чтобы рассматриваемая производная стремилась к нулю или находилась в окрестностях точки экстремума системы.
и организовать воздействие на ОУ таким образом, чтобы рассматриваемая производная стремилась к нулю или находилась в окрестностях точки экстремума системы.
Таким образом, синтез системы преследует цели о нахождении такой структуры системы адаптивного управления, при ктр выполняется условие (1)
Таким образом, получим:
 ;
;
 ;
;
Существуют многомерные экстремальные ОУ в которых имеется много входов и выходов.
 |




 I
I
 |
В случае многомерных объектов для движения к экстремуму необходимо знать градиент. Векторы проекции градиента на оси буду равны  ;
;  ; …;
; …;


МЕТОДЫ ДВИЖЕНИЯ ЭКСТРЕМУМА
1. Метод градиентного спуска (в каждом цикле движения точки выбирается направление наибольшего подъема I)
2. Метод наискорейшего спуска
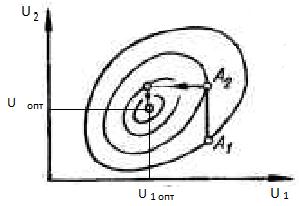
Цель управления – найти Uопт1 и Uопт2
Так как функция качества неизвестна, организовывается градиентный поиск.
В точке А выбирается направление движения, которое продолжается до тех пор, пока не прекратится рост критерия качества, то есть пока градиент не станет равным нулю по данному направлению. Шаг заканчивается в точке А2. В ней вычисляется новый градиент и движение будет идти пока увеличивается критерий качества до точки А3 и так далее.
Отличие данного метода в том, что новый градиент вычисляется после изменения знака критерия качества.
3. Метод Гаусса-Зейделя
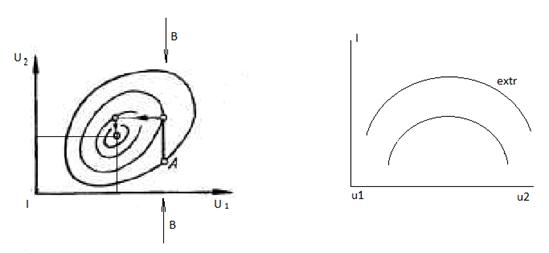
Движение осуществляется только по одной координате, вторая координата постоянна до нахождения экстремума по данной координате
4. Метод случайного поиска
В точке А производится пробное движение по четырем основным направлениям. В каждой точке поиска осуществляется пробное движение в 3-х направлениях. Направление с наибольшей разностью критерия качества  является конечным. Метод является самым несовершенным с точки зрения времени поиска, но показывает наилучшие результаты при наличии нескольких или локальных экстремумов.
является конечным. Метод является самым несовершенным с точки зрения времени поиска, но показывает наилучшие результаты при наличии нескольких или локальных экстремумов.
МЕТОДЫ ОПРЕДЕЛЕНИЯ ГРАДИЕНТОВ
В системах экстремального управления (СЭУ) определение градиента является ключевым моментом. Управляющее воздействие напрямую зависит от знака и значения градиента. Рассмотрим несколько методов:
Метод синхронного детектирования
 С целью описания градиента dJ/du, на выход ОУ подается гармоническое колебание небольшой амплитуды
С целью описания градиента dJ/du, на выход ОУ подается гармоническое колебание небольшой амплитуды
 (1)
(1)
Из курсов высшей математики известно, что при гладких статических характеристиках объекта, выходной сигнал может быть разложен в степенной ряд Тейлора.
 (2)
(2)
Ограничимся двумя составляющими выражения
 (3)
(3)
Выражение (3) запишем с учетом выражения (1)
 (4)
(4)
Выражение (4) умножим на выражение (1) и получим:
 (5)
(5)
 Если пропустить сигнал, описывающийся выражением (5) через фильтр, то можно получить некоторые усредненные значения составляющих выражения
Если пропустить сигнал, описывающийся выражением (5) через фильтр, то можно получить некоторые усредненные значения составляющих выражения
1)
2)
С учетом вышесказанных допущений, можно записать следующую зависимость:


Таким образом получим сигнал Z, пропорциональный градиенту С с помощью дополнительного гармонического сигнала.
Для технической реализации данной процедуры, необходимо выходной сигнал OУ умножить на гармонический сигнал 
Данная процедура называется синхронным детектированием и схематично синхронный детектор можно изобразить так:
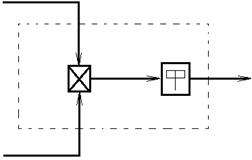

Схема оптимального управления будет иметь вид:
 |
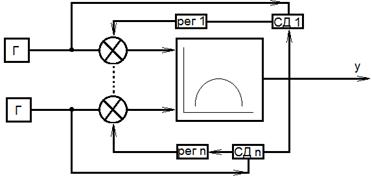
Далее, данная схема будет нуждаться в дополнительных настройках К – коэффициента передачи регулятора, А – амплитуды гармонического сигнала и  - частоты гармонического сигнала.
- частоты гармонического сигнала.
Данный метод используется при управлении многомерными объектами, тогда оптимизация будет являться многомерной.
 |


Достоинства:
Простота технической реализации, высокая устойчивость к помехам, большое быстродействие при управлении многомерными объектами.
Недостатки:
1) Трудности управления инерционными объектами.
2) Трудности предварительной настройки коэффициентов передачи регулятора и параметров гармонических сигналов при многомерном управлении.
МЕТОД ПРОИЗВОДНОЙ ПО ВРЕМЕНИ
Градиент (grad)  для экстремального объекта можно получить в результате отношения производной по времени выходного сигнала на производную по времени входного сигнала
для экстремального объекта можно получить в результате отношения производной по времени выходного сигнала на производную по времени входного сигнала
 Достоинства:
Достоинства:
 Простота реализации.
Простота реализации.
Недостатки:
1)  Возникают случаи, когда производные входного сигнала
Возникают случаи, когда производные входного сигнала  , данного положения можно избежать введением в цепь
, данного положения можно избежать введением в цепь
2) 2) Изменение производной выходного сигнала может быть вызвано так же возмущающим воздействием f, что увеличит время поиска.
3) Трудно реализовать дифференцирующее устройство в природе. Решением этого является дифференциальное звено с фильтрованием:
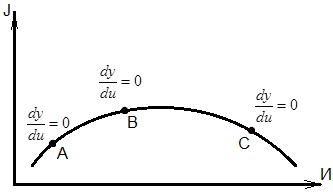
СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ (СЭУ) С ПРОИЗВОДНОЙ ПО ВРЕМЕНИ И С ПОМОЩЬЮ РЕЛЕ С ГИСТЕРЕЗИСОМ
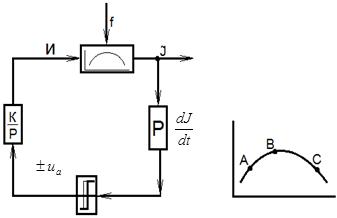
Рассмотрим статическую характеристику объекта управления. В точке А получаем  , соответственно выход гистерезиса буде положительным. Через интегрирующий регулятор, сигнал подается в объект управления, входной сигнал передвигает рабочую точку из точки А, в направлении экстремума (в точку В). Из-за наличия зоны нечувствительности, рабочая точка переходит экстремум, и достигает точки С.
, соответственно выход гистерезиса буде положительным. Через интегрирующий регулятор, сигнал подается в объект управления, входной сигнал передвигает рабочую точку из точки А, в направлении экстремума (в точку В). Из-за наличия зоны нечувствительности, рабочая точка переходит экстремум, и достигает точки С.
При этом скорость  становится < 0 и принимает отрицательный знак. Реле выдает сигнал
становится < 0 и принимает отрицательный знак. Реле выдает сигнал  , в результате чего, рабочая точка из точки С, начинает движение к экстремуму обратно. Таким образом, рабочая точка ОУ, находится в окрестностях экстремума. При малом параметре петли гистерезиса, можно достичь соответствующую точность.
, в результате чего, рабочая точка из точки С, начинает движение к экстремуму обратно. Таким образом, рабочая точка ОУ, находится в окрестностях экстремума. При малом параметре петли гистерезиса, можно достичь соответствующую точность.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 505; Нарушение авторских прав?; Мы поможем в написании вашей работы!