КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулювання. Обмеження струму в системі підпорядкованого
|
|
|
|
Обмеження струму в системі підпорядкованого
Якщо на вхід ПІ-регулятора подати стрибкоподібний сигнал  , то швидкість досягне усталеного значення
, то швидкість досягне усталеного значення 
 за час
за час  з перерегулюванням
з перерегулюванням  , Але струм перевищить допустиме значення
, Але струм перевищить допустиме значення  . Тому необхідно передбачити обмеження струму в перехідних процесах, що досягає-ться обмеженням напруги на виході регулятора швидкості стабіліт-ронами
. Тому необхідно передбачити обмеження струму в перехідних процесах, що досягає-ться обмеженням напруги на виході регулятора швидкості стабіліт-ронами  і
і  (рис.10.3).
(рис.10.3).
Величину напруги стабілізації  визначають з рівняння
визначають з рівняння
 , (10.21)
, (10.21)
де  – стопорний струм (рис.10.2).
– стопорний струм (рис.10.2).
Окрім обмеження струму якоря в динамічних процесах шляхом обмеження напруги на виході регулятора швидкості, часто викорис-товують задавач інтенсивності (рис.10.1), за допомогою якого сиг-нал задання швидкості змінюється не стрибком, а лінійно в часі до необхідного значення.
|
|
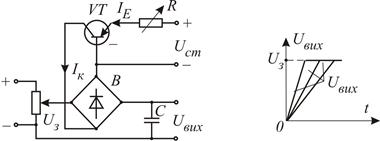
Рис.10.4. Принципова схема задавача інтенсивності (а)
і його часові характеристики (б)
Задавач інтенсивності (ЗІ) складається з випрямляча В, транзис-тора VT і конденсатора С (рис.10.4,а). Задаюча напруга  , через випрямляч В подається в коло колектора VT, який увімкнено за схемою зі спільною базою. Емітерне коло живиться від джерела стабілізованої напруги . У цій схемі включення транзистора струм колектора
, через випрямляч В подається в коло колектора VT, який увімкнено за схемою зі спільною базою. Емітерне коло живиться від джерела стабілізованої напруги . У цій схемі включення транзистора струм колектора  практично не залежить від напруги на колекто-рі. Тому при вмиканні напруги процес зарядки конденсатора С відбувається сталим струмом. Це призводить до того, що напруга на конденсаторі, яка є вихідною напругою ЗІ, практично змінюється в часі лінійно від нуля до
практично не залежить від напруги на колекто-рі. Тому при вмиканні напруги процес зарядки конденсатора С відбувається сталим струмом. Це призводить до того, що напруга на конденсаторі, яка є вихідною напругою ЗІ, практично змінюється в часі лінійно від нуля до  . При зміні полярності струм завдяки випрямлячу В не змінює свого напряму, але струм за-рядки конденсатора при цьому змінює свій напрямок. Тому поляр-ність вихідної напруги ЗІ завжди співпадає зі полярністю задаючої.
. При зміні полярності струм завдяки випрямлячу В не змінює свого напряму, але струм за-рядки конденсатора при цьому змінює свій напрямок. Тому поляр-ність вихідної напруги ЗІ завжди співпадає зі полярністю задаючої.
 Змінюючи струм емітатора
Змінюючи струм емітатора  резистором
резистором  , можна змінювати інтенсивність наростання вихідної напруги (рис.10.4,б) і тим самим за-давати необхідне прискорення елек-троприводу в процесах пуску і галь-мування.
, можна змінювати інтенсивність наростання вихідної напруги (рис.10.4,б) і тим самим за-давати необхідне прискорення елек-троприводу в процесах пуску і галь-мування.
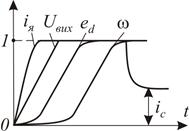
 З кривих, наведених на рис.10,5 у відносних одиницях, видно, що при лінійній зміні напруги на виході ЗІ ЕРС керованого випрямляча
З кривих, наведених на рис.10,5 у відносних одиницях, видно, що при лінійній зміні напруги на виході ЗІ ЕРС керованого випрямляча  і швидкість двигуна
і швидкість двигуна  змінюються за законами, близькими до лінійних. При цьому струм якоря
змінюються за законами, близькими до лінійних. При цьому струм якоря  спочатку швидко наростає до заданого значення, після залишається сталим і при швидкості, близькій до усталеної, спадає до
спочатку швидко наростає до заданого значення, після залишається сталим і при швидкості, близькій до усталеної, спадає до  , де
, де  – момент навантаження.
– момент навантаження.
Коли при усталеному русі електропривода різко зміниться мо-мент сил опору (ударне навантаження), то струм якоря може пере-вищити допустиме значення. Тому при використанні задавача інтен-сивності обов’язковим є обмеження напруги на виході регулятора швидкості.
Для перевірки правильності розрахунків проводять моделювання роботи системи в динамічних режимах методом, який описаний в розділі 9.3, з врахуванням способів обмеження струму. Окрім того, для отримання результатів, близьких до реальних, слід моделювати керований випрямляч як ланку з обмеженням ЕРС номінальним значенням.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 379; Нарушение авторских прав?; Мы поможем в написании вашей работы!