КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Static mechanical and electromechanical characteristics of DC independent excitation electric motor (DCM IE)
|
|
|
|
A name “mechanical characteristic” of electric motor indicates that although electric motor has the majority of electric parameters and coordinates, this characteristic shows only the relation between mechanical parameters of electric motors (moment and speed). This characteristic is needed to connect electric motor with mechanical object (executive mechanism), which has only mechanical parameters and coordinates. Knowledge of mechanical characteristics of mechanism (operating machine)

and mechanical characteristics of electric motor

gives possibility to connect the machine and electric motor into a complete electromechanical system (electric drive) so that characteristics of machine and motor correspond to each other and meet the requirements of technological process, for which this pair operates. In other words: “so that machine and motor come together with characters, and so that their marriage would be strong and long, and there would not be need to speak about a divorce”.
Everything will be alright with mechanics after this, but electric motor is an electric system from the other side, therefore it has to have characteristics in accordance to electromagnetic processes connected with electromechanical processes. In other words, a motor has to overcome static resistance moment of operating machine in limits of it loading capacity (admissible thermal regime). Electromechanical characteristic of electric motor serves to connect these processes properly.
Electromechanical static characteristic of motor is the relationship of motor speed from the current of its main circuit

in attained duty of electric motor operation and represents a connection between electrical and mechanical values and allows to define the overload of electric motor by current at specified values of motor moment.
Such estimation of electric motor is very important for electrical machine, because the current magnitude must be strictly limited by conditions of windings heating and cooling, and for DC motors also by commutation conditions.
With this, mechanical and electromechanical static characteristics are closely interconnected so as current and moment are interconnected in electric motor.
In DC independent excitation motors such connection is direct:
 ;
;  ;
;
where  .
.
Normal scheme of DCM IE switching on is represented on figure 3.5.
In distinction from “machine” meaning of parallel excitation motor and independent excitation motor as different physical subjects, difference between them in ED theory is enough conventional. Here DCM IE is considered virtually as the same subject, if motor is energized from the network of not relative but the greater power. In practice in the most cases the power of network is actually greater than power of motor. So it is not essential if there are conductors, indicated on figure 3.5 with dashed lines ab and cd, or there are no, and voltage sources Ue and Un are different, or it is the same source.
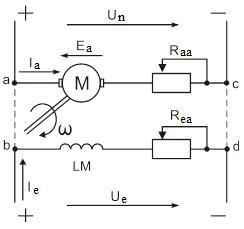
Figure 3.5 – Normal scheme of DCM IE switching on.
Explanation of process nature is such. If the power of network is very high comparatively to the power of electric motor (theoretically a network of infinite power), then internal resistance of such power source is very small and does not depend on the current of network, so that voltage of such network is constant
 ,
,
and DCM according to classical scheme of parallel excitation will have in parallel circuit (excitation circuit) the excitation voltage  , which does not depend on current value – the same as in DCM IE at energizing of excitation winding from the independent power source.
, which does not depend on current value – the same as in DCM IE at energizing of excitation winding from the independent power source.
Really in electric drives armature of motor and excitation winding are energized from different, independent from each other sources (converters) of voltages  and , that allows independently regulate the voltage on the armature and on the excitation winding and design them for the various nominal voltage. Only with presence of DC supply network or with non-regulated converter in the armature circuit, the excitation winding is powered from the same source as the armature circuit, but in this case, as abovementioned, the excitation current І e does not depend on the armature current
and , that allows independently regulate the voltage on the armature and on the excitation winding and design them for the various nominal voltage. Only with presence of DC supply network or with non-regulated converter in the armature circuit, the excitation winding is powered from the same source as the armature circuit, but in this case, as abovementioned, the excitation current І e does not depend on the armature current  .
.
Let us assume that represented on the abovementioned figure directions of current and e.m.f. of motor rotation correspond to motor regime of electric motor operation, when electric energy is consuming by motor from the network and is transforming into the mechanical energy, the power of which equals to
 ,
, 
where the relationship between  and
and  is defined by the mechanical characteristic of motor.
is defined by the mechanical characteristic of motor.
Analytic expression of mechanical characteristic can be derived from the equation of voltage equilibrium, composed for the armature circuit (figure 3.5). At attained motion the network voltage applied to the motor,  is balanced by the voltage drop or armature circuit
is balanced by the voltage drop or armature circuit  and induced in the armature e.m.f.
and induced in the armature e.m.f. , , i.e.
, , i.e.
 (3.6)
(3.6)
where - current of armature circuit,  ;
;
 - is the total resistance of armature circuit, that consists of internal resistance of armature
- is the total resistance of armature circuit, that consists of internal resistance of armature  and the resistance of additional resistor
and the resistance of additional resistor  for regulation of armature current ,
for regulation of armature current ,  .
.
consists of resistance of armature winding, resistance of additional poles winding and resistance of compensation winding (if DCM has such windings).
Induced in motor armature e.m.f., as is known, is defined by formula:
 (3.7)
(3.7)
where  – constructive electromachine constant of motor (
– constructive electromachine constant of motor ( - number of pole pairs,
- number of pole pairs,  - number of active conductors of armature winding,
- number of active conductors of armature winding,  - number of parallel branches pairs (of armature winding) represented in system of units СІ, and in practice system electromachine constant of motor
- number of parallel branches pairs (of armature winding) represented in system of units СІ, and in practice system electromachine constant of motor  ; there is the same connection between
; there is the same connection between  and
and  as between and
as between and  – angular speed
– angular speed  and rotational frequency
and rotational frequency  - is such:
- is such:
 ;
;
 - is magnetic flux of motor, if the motor is compensated and the reaction of armature does not have place, so this is main flux, flux created by excitation current – m.m.f. of excitation winding,
- is magnetic flux of motor, if the motor is compensated and the reaction of armature does not have place, so this is main flux, flux created by excitation current – m.m.f. of excitation winding,  .
.
In the system СІ the physical units of equation (3.7) are written as


R.U. – relative units (non-dimensional)

If into the equation (3.6) instead of substitute its value from the formula (3.7) and solve this equation with respect to speed , it will be obtained
 ,
,
 . (3.8)
. (3.8)
Equation (3.8) is the relationship of DCM speed from the armature current, i.e.
 ,
,
in such a way equation (3.8) is analytic expression of electromechanical characteristic of DCM IE.
To obtain an analytic expression of mechanical characteristic  it is necessary to find the relationship of motor speed from its moment .It is necessary to use for this a well-known expression of moment for DCM
it is necessary to find the relationship of motor speed from its moment .It is necessary to use for this a well-known expression of moment for DCM
 ,
,  . (3.9)
. (3.9)
Exactly speaking, to derive such relationship one should use not the electromagnetic moment of motor (3.9), but moment on the shaft of motor, i.e. the moment less than in scale of idling rate losses. However for practical accuracy of calculations the neglect of these losses have no vital importance.
If into the equation (3.8) instead of to substitute its value from the equation (3.9)

then the analytic expression of relationship of from , i.e. of mechanical characteristic of motor will be obtained
 ,
,
 , або (3.9¢)
, або (3.9¢)
 , (3.10)
, (3.10)
де  , .
, .
In such a way, equations (3.8) and (3.10) are an analytic expression of electromechanical and mechanical characteristics correspondently of the DCM IE.
If in equations (3.8) and (3.10) the coefficients  , , and
, , and  are the constants, then mathematically these equations are of the type
are the constants, then mathematically these equations are of the type
 ,
,
and circumscribe straight lines that do not pass through the origin of coordinates.
So it is easy to conclude about the rectilinearity of static characteristics, if abovementioned coefficients can be considered as constants taking into account the proceeding with this physical processes.
Let’s consider them in details.
 . Actually this parameter is the constant value, because it depends only on construction and constructive features of specific electric motor, i.e. it is the constructive constant.
. Actually this parameter is the constant value, because it depends only on construction and constructive features of specific electric motor, i.e. it is the constructive constant.
 . In the case when the power of energy source is significantly greater than the electric motor power, the external characteristic of energy source
. In the case when the power of energy source is significantly greater than the electric motor power, the external characteristic of energy source  can be considered as absolutely rigid, and the network voltage as constant.
can be considered as absolutely rigid, and the network voltage as constant.
 . For compensated electric motor of independent excitation absolutely right will be the neglect of armature reaction, in this case the considered magnetic flux of machine will be the constant magnetic flux of excitation.
. For compensated electric motor of independent excitation absolutely right will be the neglect of armature reaction, in this case the considered magnetic flux of machine will be the constant magnetic flux of excitation.
 Assumption that
Assumption that  will be absolutely correct, if to neglect the non-linear relationship of resistance in transient contact of sliding collector – brush. This transient non-linear resistance has complicated physical nature (conduction current, transfer current are flowing through it, thermoelectronic emissions of Іst and ІІnd type, galvanic processes are present an so on), but the magnitude of this resistance is significantly less than total resistance of the rest armature circuit elements and it can be neglected.
will be absolutely correct, if to neglect the non-linear relationship of resistance in transient contact of sliding collector – brush. This transient non-linear resistance has complicated physical nature (conduction current, transfer current are flowing through it, thermoelectronic emissions of Іst and ІІnd type, galvanic processes are present an so on), but the magnitude of this resistance is significantly less than total resistance of the rest armature circuit elements and it can be neglected.
Thus, with the pedantic accuracy it can be affirmed that rectilinear static characteristics must have only totally compensated DCM IE with stable constructive constant and “dark” commutation, that are energized from the network of infinite power. But with accepted for practice accuracy the properties of characteristics linearity can be transferred into the real conditions of motor operation.
From equations (3.8) and (3.10) one can affirm, that at the specified resistance moment on the motor shaft various speeds at changing the abovementioned constants can be obtained, i.e. the regulation of drive speed can be realized.
At first let’s consider the influence on the static characteristics of only the one from four mentioned parameters, namely – the resistance of armature circuit, because this will be necessary at consideration of operation regimes and mechanical characteristics of these regimes.
As for DCM IE , then from the expression
one can see  , i.e.
, i.e.  , and plotted electromechanical and mechanical characteristics are qualitively identical and differ from each other only by scale linear coefficient
, and plotted electromechanical and mechanical characteristics are qualitively identical and differ from each other only by scale linear coefficient
 .
.
Taking into account all these things the graphical view of characteristics (equations (3.8) and (3.10)) for various values of will be such as shown on figure 3.6.
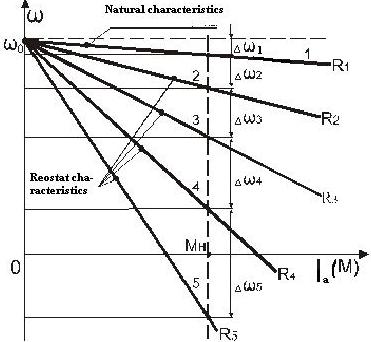
Characteristics are built for such values of armature circuit resistance:

 ,
,
where  is internal armature resistance;
is internal armature resistance;
 is an additional armature resistance.
is an additional armature resistance.
As it shown on figures (3.8) and (3.10), at M=0 (Ia=0) all characteristics intersect at one point (on figure it is the point ω0). At this point the speed has definite value and doesn`t depend on value of armature circuit resistance.
At motor operation the case Ia=0 (M=0), that is absence of current in armature circuit is possible only in ideally open circuit mode, speed of which
 (3.11)
(3.11)
will be called the speed of ideal open circuit.
At the speed of ideal open circuit, when armature current Ia=0, armature emf Ea is directed n opposite with supply voltage and is equal to this voltage modulo.
The second member of equations (3.8) and (3.10) is presented as difference of real speed respectively to ideal open circuit speed – static difference of ED angular speed.
 , (3.12)
, (3.12)
 . (3.13)
. (3.13)
Thus, equations (3.8) and (3.10), taking into account (3.11) and (3.12) may be presented in the next view:
 (3.14)
(3.14)
This characteristic from characteristic set, shown at the last figure is called natural electromechanical (mechanical) characteristic.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1172; Нарушение авторских прав?; Мы поможем в написании вашей работы!