КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Електричні виконавчі пристрої
|
|
|
|
 До найважливіших електричних виконавчих пристроїв належать двигуни змінного струму, двигуни постійного струму і крокові двигуни. Їх дія базується на явищі створення на провіднику, через який протікає струм, зусилля за допомогою магнітного поля. Магнітне поле створюється за допомогою електромагнітів або постійних магнітів. Крім того існують виконавчі пристрої, побудовані на явищах п'єзоелектрики, магнітострикції, які використовують властивості „металу з пам'яттю" (Memory Metall).
До найважливіших електричних виконавчих пристроїв належать двигуни змінного струму, двигуни постійного струму і крокові двигуни. Їх дія базується на явищі створення на провіднику, через який протікає струм, зусилля за допомогою магнітного поля. Магнітне поле створюється за допомогою електромагнітів або постійних магнітів. Крім того існують виконавчі пристрої, побудовані на явищах п'єзоелектрики, магнітострикції, які використовують властивості „металу з пам'яттю" (Memory Metall).

 Технологія матеріалів для створення постійних магнітів значно удосконалилася в останні роки. Це знайшло своє відображення в будові електричних двигунів. Тепер для створення магнітного поля все частіше застосовуються постійні магніти; це сприяло покращенню коефіцієнта видатності двигунів і зменшенню їх ваги. Величиною, яка характеризує коефіцієнт видатності постійних магнітів, є максимальне значення добутку BH max, де B - індукція залишкового магнітного поля, а Н - напруженість коерцитивної сили (рис. 4.10). Чим більша індукція В, тим сильніший магніт, чим більша напруженість поля H, тим менша небезпека його розмагнічення або ослаблення (рис. 4.11). Максимальне значення добутку BH max визначає енергетичну ефективність постійного магніту.
Технологія матеріалів для створення постійних магнітів значно удосконалилася в останні роки. Це знайшло своє відображення в будові електричних двигунів. Тепер для створення магнітного поля все частіше застосовуються постійні магніти; це сприяло покращенню коефіцієнта видатності двигунів і зменшенню їх ваги. Величиною, яка характеризує коефіцієнт видатності постійних магнітів, є максимальне значення добутку BH max, де B - індукція залишкового магнітного поля, а Н - напруженість коерцитивної сили (рис. 4.10). Чим більша індукція В, тим сильніший магніт, чим більша напруженість поля H, тим менша небезпека його розмагнічення або ослаблення (рис. 4.11). Максимальне значення добутку BH max визначає енергетичну ефективність постійного магніту.
Електромагніти і електромагнітні муфти. Виконавчі пристрої, побудовані на базі електромагнітів, складаються з котушки із залізним осердям і рухомого залізного стрижня,такзваного якоря. Протікання струму через котушку викликає притягування якоря. Якір розташовується таким чином, щоб існував якнайменший магнітний опір для лінії магнітного потоку. Розрізняються притягувальні електромагніти з якорем, що пересувається лінійно, і обертові електромагніти з обертовим якорем (рис. 4.12). Рухомий якір розташовується так, щоб магнітний опір був якнайменший.
Електромагнітні муфти застосовуються для дистанційного або самостійного перемикання а також для гальмування передач.Середелектромагнітних муфт розрізняють однодискові (рис. 4.13), багатопластинчасті, порошкові і зубчасті муфти.
 Двигуни змінного струму. Найчастіше застосовуваним двигуном, який живиться від мережі змінного струму є асинхронний трифазний двигун.
Двигуни змінного струму. Найчастіше застосовуваним двигуном, який живиться від мережі змінного струму є асинхронний трифазний двигун.
Асинхронний двигун має простішу будову ніж двигун постійного струму, але при тій самій потужності більші розміри і вагу. Він складається з статора, який містить обмотку статора поділену на три частини з кінцями U1-U2, V1-V2, W1-W2, і ротора (рис. 4.14). Двигун трифазного струму може бути безпосередньо увімкнений до трифазної мережі змінного струму. Залежно від виду ротора розрізняються короткозамкнені двигуни і двигуни з фазним ротором (рис. 4.15)
 Короткозамкнений двигун. У короткозамкненому двигуні ротор у формі бочки складається з шихтованого пакету з пазами, в яких розміщені алюмінієві або мідні стрижні, а також фронтальних кілець з алюмінію або міді. В загальному алюмінієва частини виготовлена шляхом безпосереднього відливання під тиском в шихтованому пакеті. Якщо уявити собі цю алюмінієву конструкцію без шихтованого пакету, то має вона вигляд клітки. Стрижні в клітці, як правило, розташовані скошено. За допомогою цього отримують рівномірне обертання двигуна.
Короткозамкнений двигун. У короткозамкненому двигуні ротор у формі бочки складається з шихтованого пакету з пазами, в яких розміщені алюмінієві або мідні стрижні, а також фронтальних кілець з алюмінію або міді. В загальному алюмінієва частини виготовлена шляхом безпосереднього відливання під тиском в шихтованому пакеті. Якщо уявити собі цю алюмінієву конструкцію без шихтованого пакету, то має вона вигляд клітки. Стрижні в клітці, як правило, розташовані скошено. За допомогою цього отримують рівномірне обертання двигуна.
Стрижні клітки розміщені не в суцільно металевому циліндрі, а в шихтованому пакеті, так як струми, які індукуються в стрижнях, є теж змінними струмами і вони створюють змінне магнітне поле. У сталевому циліндрі змінне поле створює струми, що призводить до значних теплових втрат. У шихтованому пакеті вихрові струми не такі значні, тому що шар оксидів на площі металевої виштамповки є ізолятором.
 Двигун з фазним ротором. Ротор двигуна з фазним ротором складається, подібно як короткозамкнений ротор, з вала і шихтованого пакету, але в пазах пакету знаходиться трифазна обмотка. Ця обмотка з'єднана в зірку, тобто три кінці обмоток з'єднані в одну точку (так звану нульову). Інші три кінці обмоток крізь три ковзні кільця і
Двигун з фазним ротором. Ротор двигуна з фазним ротором складається, подібно як короткозамкнений ротор, з вала і шихтованого пакету, але в пазах пакету знаходиться трифазна обмотка. Ця обмотка з'єднана в зірку, тобто три кінці обмоток з'єднані в одну точку (так звану нульову). Інші три кінці обмоток крізь три ковзні кільця і  три щітки, виведені назовні, до кінців K, L, M. Під час нормальної роботи двигуна кінця K, L, M є закорочені. В процесі запуску і при певному керуванні частотою обертання двигуна до кінців K, L, M обмотки ротора підмикають відповідні пристрої.
три щітки, виведені назовні, до кінців K, L, M. Під час нормальної роботи двигуна кінця K, L, M є закорочені. В процесі запуску і при певному керуванні частотою обертання двигуна до кінців K, L, M обмотки ротора підмикають відповідні пристрої.
Обертове магнітне поле. За допомогою трифазного струму можна просто створити обертове магнітне поле. Якщо підімкнути обмотки статора до трифазної мережі то в кожній обмотці циклічно, з частотою мережі 50 разів на секунду (у випадку 50 Гц), змінюється напрям струму і, відповідно, напрям створюваного магнітного поля. Оскільки три обмотки U, V, W взаємно зміщені на 120° і живляться струмами IU, IV, IW також зміщеними за фазою на 120°, відповідно, струми, змінюючись почергово в обмотках, створюють в середині статора обертове магнітне поле (рис. 4.16). Обертове магнітне поле виникає, створюючи полюси, які розміщені на периметрі статора: від північного до південного (машина з однією парою полюсів). Це поле в індукує в  стрижнях або в обмотці ротора струм, що призводить до виникнення магнітного поля ротора, яке обертається в напрямі обертання поля статора разом з ротором. Проте ротор не досягає швидкості обертання поля статора. Залежно від навантаження – швидкість обертання є на декілька відсотків нижча і ротор обертається асинхронно (asynchron. з грецької неспівбіжний, несинхронний). Обертове поле обмотки, згідно з рис. 4.16, яка живиться від мережі 50 Гц, обертається 3000 разів на хвилину або один раз за період 20 мс. Якщо в асинхронній машині з двома парами полюсів з'єднати і заживити 3 обмотки у верхній половині статора, а також 3 обмотки у нижній половині статора, то отримаємо два обертові поля. Кожне з них з періодом 20 мс обертається на половині периметра статора. Швидкість обертового поля статора у цьому випадку становитиме 1500 об/хв. Змінний трифазний струм створює в трьох фазах обмоток статора обертове магнітне поле. Обмотки трифазного струму можуть бути розміщені на периметрі статора з різною кратністю - таким чином виникає поле з різною швидкістю обертання і, відповідно, різна швидкість обертання двигуна (табл. 4.2).
стрижнях або в обмотці ротора струм, що призводить до виникнення магнітного поля ротора, яке обертається в напрямі обертання поля статора разом з ротором. Проте ротор не досягає швидкості обертання поля статора. Залежно від навантаження – швидкість обертання є на декілька відсотків нижча і ротор обертається асинхронно (asynchron. з грецької неспівбіжний, несинхронний). Обертове поле обмотки, згідно з рис. 4.16, яка живиться від мережі 50 Гц, обертається 3000 разів на хвилину або один раз за період 20 мс. Якщо в асинхронній машині з двома парами полюсів з'єднати і заживити 3 обмотки у верхній половині статора, а також 3 обмотки у нижній половині статора, то отримаємо два обертові поля. Кожне з них з періодом 20 мс обертається на половині периметра статора. Швидкість обертового поля статора у цьому випадку становитиме 1500 об/хв. Змінний трифазний струм створює в трьох фазах обмоток статора обертове магнітне поле. Обмотки трифазного струму можуть бути розміщені на периметрі статора з різною кратністю - таким чином виникає поле з різною швидкістю обертання і, відповідно, різна швидкість обертання двигуна (табл. 4.2).
Принцип дії асинхронного двигуна змінного струму. При під’єднанні статора до напруги живлення і нерухомому роторі виникає обертове магнітне поле, яке обертається з великою швидкістю відносно обмотки ротора і викликає в ньому високу індуковану напругу U2 (лінії поля перетинають обмотку ротора). Оскільки обмотка ротора закорочена, то в ній протікає великий струм І2, який створює магнітний потік Φ2 (рис. 4.17). На провідник, який знаходиться в магнітному полі і в якому протікає струм, діє сила. Таким чином в роторі виникає обертовий момент, який викликає обертовий рух ротора. Разом із зростанням швидкості обертання зменшується індукована в роторі напруга U2 і, у зв'язку з цим, зменшується також струм І2. Коли ротор досягне швидкості обертання, наближеної до швидкості обертання поля статора ns, тоді обмотка ротора за одиницю часу перетинає дуже малу кількість ліній поля. Наслідком цього є мала напруга на роторі U2 і дуже малий струм І2. Тоді обертового моменту вистарчає лише на подолання сили опору тертя в підшипниках і опору повітря. Ротор обертається, але не так швидко, як обертове поле статора. Обертання двигуна не є синхронним з обертанням поля, а лише асинхронним і завжди від нього трохи повільнішим. Обертовий момент асинхронного двигуна не є пропорційним до струму ротора I2, відносно до струму статора І, тому що фазове зсув між напругою живлення статора і споживаним струмом сильно залежить від швидкості обертання двигуна (рис. 4.18).
Тільки миттєвий активний струм впливає на значення обертового моменту. Таким чином найбільший момент не буде при найбільшому струмі при загальмованому роторі, а буде при швидкості приблизно 2/3 від синхронної швидкості обертання (обертання поля статора). Це показано на рис. 4.19. Найбільший момент називають критичним моментом Mк. Якщо навантажувати початково ненавантажений двигун все більшим моментом, то швидкість обертання знизиться приблизно на 20%. Якщо навантаження досягне значення критичного моменту Мк, то наступить зупинка двигуна.
Номінальний момент Мн становить приблизно 1/3 значення критичного Мк. Номінальні швидкості обертання є приблизно на 5% менші від синхронних швидкостей обертання. Це відносне (у процентах) відхилення номінальної швидкості обертання від синхронної називають номінальним ковзанням. Обмотки статора можна під’єднувати до трифазної мережі за схемою зірки або трикутника (рис. 4.20).
При з'єднанні за схемою трикутника, для мережі 380 В на кожній обмотці буде 380 В змінної напруги, натомість при з'єднанні в схему зірки тільки 380 В/ = 220 В. Трифазний асинхронний двигун ввімкнений за схемою трикутника споживає більший струм, ніж в схемі зірки, але враховуючи на вмикання обмоток до напруги (в
= 220 В. Трифазний асинхронний двигун ввімкнений за схемою трикутника споживає більший струм, ніж в схемі зірки, але враховуючи на вмикання обмоток до напруги (в більшої), отримується в три рази більша потужність і в три рази більший обертовий момент. Трифазні асинхронні двигуни переважно працюють за схемою трикутника.
більшої), отримується в три рази більша потужність і в три рази більший обертовий момент. Трифазні асинхронні двигуни переважно працюють за схемою трикутника.
 Керування пуском. Трифазні асинхронні двигуни при безпосередньому вмиканні споживають струм, який більший від 3 до 6 разів ніж номінальний. Двигуни потужністю понад 4 кВт не можна під'єднувати безпосередньо до мережі, тому що великі пускові струми створюють в ній значні коливання напруги. Тому трифазні асинхронні двигуни з потужністю від 4 кВт до 12 кВт вмикаються спочатку за схемою зірки, а лише після пуску перемикають в схему трикутника. Двигун з потужністю 12 кВт, яку він розвиває при вмиканні за схемою трикутника, при з'єднанні за схемою зірки споживає такий струм, як двигун 7 кВт (12 кВт: = 7 кВт).
Керування пуском. Трифазні асинхронні двигуни при безпосередньому вмиканні споживають струм, який більший від 3 до 6 разів ніж номінальний. Двигуни потужністю понад 4 кВт не можна під'єднувати безпосередньо до мережі, тому що великі пускові струми створюють в ній значні коливання напруги. Тому трифазні асинхронні двигуни з потужністю від 4 кВт до 12 кВт вмикаються спочатку за схемою зірки, а лише після пуску перемикають в схему трикутника. Двигун з потужністю 12 кВт, яку він розвиває при вмиканні за схемою трикутника, при з'єднанні за схемою зірки споживає такий струм, як двигун 7 кВт (12 кВт: = 7 кВт).
Схема пуску зірка-трикутник. Перемикальна схема зірка – трикутник, як правило, реалізується за допомогою контакторів (рис. 4.21). В схемі зірки (Y), контактором K1 під'єднуються три кінці котушок U1, V1, W1 до мережі, а другі три кінці U2,  V2, W2 сполучаються через контактор K2 в одну точку зірки. Це здійснюється вмиканням кнопкового вимикача S1. Контактор K1 також подає напругу на реле часу K4. Після налаштованого часу затримки, яка дорівнює часу пуску двигуна, вмикається K4 і, відповідно, вимикається K2 і вмикається K3. Потім контактор K3 замикає кінці обмоток U1-U2, V1-V2, W1-W2 і утворюється схема трикутника (Δ). Захисне реле F1 з термічним вимикачем захищає двигун від перевантаження. Його розмикальний контакт вимикає контактори. Схема пуску зірка-трикутник зменшує пусковий струм і момент в три рази.
V2, W2 сполучаються через контактор K2 в одну точку зірки. Це здійснюється вмиканням кнопкового вимикача S1. Контактор K1 також подає напругу на реле часу K4. Після налаштованого часу затримки, яка дорівнює часу пуску двигуна, вмикається K4 і, відповідно, вимикається K2 і вмикається K3. Потім контактор K3 замикає кінці обмоток U1-U2, V1-V2, W1-W2 і утворюється схема трикутника (Δ). Захисне реле F1 з термічним вимикачем захищає двигун від перевантаження. Його розмикальний контакт вимикає контактори. Схема пуску зірка-трикутник зменшує пусковий струм і момент в три рази.
 Пуск двигунів з фазним ротором. Двигуни з фазним ротором вмикаються з додатковими опорами в колі ротора (рис. 4.22). Пускові резистори забезпечують зменшення струму в роторі і тим самим струму, споживаного з мережі. Контактор K1 вмикає двигун. Разом з наростанням швидкості обертання за допомогою контакторів K2 і K3 по черзі блокуються пускові резистори. Пусковий момент двигуна з фазним ротором в декілька разів більший від номінального моменту.
Пуск двигунів з фазним ротором. Двигуни з фазним ротором вмикаються з додатковими опорами в колі ротора (рис. 4.22). Пускові резистори забезпечують зменшення струму в роторі і тим самим струму, споживаного з мережі. Контактор K1 вмикає двигун. Разом з наростанням швидкості обертання за допомогою контакторів K2 і K3 по черзі блокуються пускові резистори. Пусковий момент двигуна з фазним ротором в декілька разів більший від номінального моменту.
Пуск двигуна з трансформатором зі змінним коефіцієнтом трансформації. Асинхронні двигуни можна також пускати за допомогою трансформаторів зі змінним коефіцієнтом трансформації, повільно збільшуючи напругу живлення.
 М'який пуск короткозамкнених двигунів. Часто для захисту механічної передачі вимагається м'який пуск двигуна, наприклад, в приводі головного шпинделя фрезерного верстата. Це реалізується за допомогою системи м'якого пуску двигуна. У системі м'якого пуску, в одному з провідників живлення обмотки статора, розміщується резистор, що призводить до зменшення пускового струму і моменту (рис. 4.23). Після пуску, контактор K2 замикає (блокує) резистор. Контактор K2 вводиться в дію за допомогою реле часу K3.
М'який пуск короткозамкнених двигунів. Часто для захисту механічної передачі вимагається м'який пуск двигуна, наприклад, в приводі головного шпинделя фрезерного верстата. Це реалізується за допомогою системи м'якого пуску двигуна. У системі м'якого пуску, в одному з провідників живлення обмотки статора, розміщується резистор, що призводить до зменшення пускового струму і моменту (рис. 4.23). Після пуску, контактор K2 замикає (блокує) резистор. Контактор K2 вводиться в дію за допомогою реле часу K3.
Зміна напряму обертання. Шляхом зміни місцями двох з трьох провідників, які живлять асинхронний двигун, змінюється напрям обертання поля статора, а тим самим напрям обертання ротора двигуна. Зміна місцями кінців двох провідників реалізується контакторною системою реверсування (рис. 4.24). Контактор K1 вмикає обертання двигуна вправо, а контактор K2 - вліво. Обидва контактори взаємно блоковані як за допомогою кнопкових вимикачів S2 і S3, так і розімкнених контактів K1 і K2. Якщо двигун є у стані спокою, то за допомогою вмикання кнопкового вимикача S2 або S3 двигун безпосередньо вмикається вправо або, відповідно, вліво. Якщо двигун обертається, то шляхом вмикання кнопки  протилежного напрямку обертання, спочатку розмикається попереднє коло живлення, а потім через контакти іншого контактора, подається живлення для обертання в заданому напрямі.
протилежного напрямку обертання, спочатку розмикається попереднє коло живлення, а потім через контакти іншого контактора, подається живлення для обертання в заданому напрямі.
Керування швидкістю обертання. У асинхронних двигунах швидкість обертання ротора регулюється полем статора, шляхом зміни частоти мережі і кількості полюсів. Робоча швидкість обертання ротора, залежно від навантаження, на декілька відсотків нижча від швидкості обертання поля статора. Двигуни з полюсами, що перемикаються, можуть працювати з різною кількістю пар полюсів статора, а отже розвивати декілька швидкостей обертання. Розрізняються схеми перемикання полюсів з окремими обмотками і перемикальною кількістю пар полюсів (система Дахландера). У першому рішенні на статорі розміщується перша обмотка 1U, 1V, 1W з кількістю полюсів р1 = 6 для швидкості обертання поля 1000 об/хв, а також друга обмотка 2U, 2V, 2W з кількістю полюсів р2 = 4 для швидкості обертання поля 1500 об/хв (рис. 4.25).
Система керування двигуном з окремими обмотками відповідає, у принципі, релейно-контакторній схемі для зміни напряму обертання. Контактори повинні бути взаємно блоковані. Оскільки в статорі мусять бути намотані дві обмотки 1 і 2, то на їх розміщення потрібне місце. Через це двигуни такого типу мають значні розміри, стосовно потужності яку вони розвивають. Двигуни з окремими обмотками, наприклад, з 6 і 4 полюсами, застосовуються в транспортних системах.
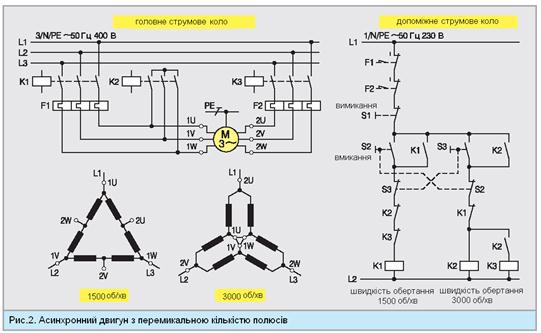
У системі Дахландера для отримання двох швидкостей обертання обмотку статора поділено на шість сегментів (рис. 2). Для отримання низьких швидкостей 2 секції обмотки кожної фази сполучаються послідовно і в трикутник, для вищих (подвоєних) швидкостей обертання 2 секції обмотки сполучаються паралельно і працюють в системі подвійної зірки. Моменти обертання при обох швидкостях дуже близькі. За високих швидкостей обертання потужність майже вдвічі вища ніж за низьких.
Три швидкості обертання. Часто для отримання низьких швидкостей обертання застосовується комбінація схеми Дахландера і схеми з поділеною обмоткою (рис. 4.26). Пуск відбувається контактором і з'єднання обмоток для низької швидкості обертання. Середню швидкість обертання отримують вводячи в дію контактор K2, причому K1 мусить бути вимкнений. Високу швидкість обертання отримують при ввімкнениих контакторах K3 і K4, причому K1 і K2 повинні бути вимкнені.
Схема Дахландера часто застосовується для головного приводу шпинделя у фрезерних верстатах. Отримані можливості зміни швидкості обертання дозволяють вилучити одну ступінь в механічній коробці передачі верстата.
 У системах керування ковзанням змінюється опір R ротора. Наслідком є зміна нахилу характеристики момент обертання/швидкість обертання (рис.4.27). Швидкість обертового поля залишається незмінною, а при навантаженні номінальним моментом, відповідно для R1, R2, R3, отримуємо швидкості обертання n1, n2, n3, при чому R1< R2< R3. Ковзання, тобто різниця швидкості обертання по відношенню до швидкості обертового поля, зростає тим більше, чим більше навантаження і більший нахил характеристики.
У системах керування ковзанням змінюється опір R ротора. Наслідком є зміна нахилу характеристики момент обертання/швидкість обертання (рис.4.27). Швидкість обертового поля залишається незмінною, а при навантаженні номінальним моментом, відповідно для R1, R2, R3, отримуємо швидкості обертання n1, n2, n3, при чому R1< R2< R3. Ковзання, тобто різниця швидкості обертання по відношенню до швидкості обертового поля, зростає тим більше, чим більше навантаження і більший нахил характеристики.
 Двигуни змінного струму з електронною комутацією. Синхронні і асинхронні двигуни змінного струму з електронною комутацією щораз частіше застосовуються замість двигунів постійного струму. Їх також називають безщітковими приводами з регульованою швидкістю обертання. Під поняттям комутації розуміється перемикання напряму протікання струму в обмотках двигуна.
Двигуни змінного струму з електронною комутацією. Синхронні і асинхронні двигуни змінного струму з електронною комутацією щораз частіше застосовуються замість двигунів постійного струму. Їх також називають безщітковими приводами з регульованою швидкістю обертання. Під поняттям комутації розуміється перемикання напряму протікання струму в обмотках двигуна.
Синхронні двигуни змінного струму з електронною комутацією. В трифазному синхронному двигуні з електронною комутацією, залежно від миттєвого положення ротора, відбувається електронне керування струмом в обмотках статора. Ротор містить постійні магніти і розташовується згідно з вектором магнітного потоку статора. Цей вид двигунів також називають безщітковим двигуном постійного струму. Його застосовується перш за все в приводах подачі верстатів і в робототехніці (приводи комплексів руху роботів). Двигуни з електронною комутацією обов'язково оснащуються сенсорами (давачами) кута положення ротора для керування комутацією. Вище згаданий сенсор також використовується в системі регулювання кутового положення валу двигуна.
Переваги синхронного двигуна змінного струму
· менші розміри порівняно з двигуном постійного струму,
· висока швидкодія,
· дуже великий діапазон регулювання швидкості обертання (до 1:20000), тобто найнижча швидкість обертання, при яких двигун ще обертається рівномірно, є в 20000 раз менша від максимальної,
· малі затрати на обслуговування, відсутність зношення щіток,
· комутація не знижує обертовий момент,
· краще ніж в двигуні постійного струму відведення тепла, тому що в статорі є тільки одна обмотка,
· ККД вищий, ніж в двигуна постійного струму
· закрита конструкція, ступінь безпеки IP65 (захист від запилення і бризкання води).
· більший термін роботи, ніж двигуна постійного струму,
менша вага від двигуна постійного струму.
 Будова. Ротор, як і статор, складається з шихтованих пакетів. Це призводить до зменшення проникнення змінного магнітного потоку статора, а в результаті зменшення вихрових струмів і пов'язаних з ними втрат. Ротор має усередині великі порожнини, які зменшують вагу і перш за все момент інерції (рис. 4.28). Зовнішня поверхня ротора є обкладена плитками постійних магнітів із сплаву кобальту і самарію (самарій є рідкісноземельним елементом) (рис.4.29). Пластини магнітів захищені від дії відцентрової сили за допомогою синтетичних матеріалів підсилених скловолокном. Статор двигуна має звичайну обмотку трифазного струму, вкладену в скошені пази. Це має особливе значення
Будова. Ротор, як і статор, складається з шихтованих пакетів. Це призводить до зменшення проникнення змінного магнітного потоку статора, а в результаті зменшення вихрових струмів і пов'язаних з ними втрат. Ротор має усередині великі порожнини, які зменшують вагу і перш за все момент інерції (рис. 4.28). Зовнішня поверхня ротора є обкладена плитками постійних магнітів із сплаву кобальту і самарію (самарій є рідкісноземельним елементом) (рис.4.29). Пластини магнітів захищені від дії відцентрової сили за допомогою синтетичних матеріалів підсилених скловолокном. Статор двигуна має звичайну обмотку трифазного струму, вкладену в скошені пази. Це має особливе значення  при комутації з трапецієвидною або прямокутною формою струму керування - збільшується плавність руху навіть при низьких швидкостях обертання двигуна.
при комутації з трапецієвидною або прямокутною формою струму керування - збільшується плавність руху навіть при низьких швидкостях обертання двигуна.
Принцип роботи. Система живиться трифазним струмом через трифазний імпульсний перетворювач (рис.4.30). Перетворювач спочатку перетворює трифазний струм з мережі в постійний струм і далі постійний струм в трифазний струм з параметрами залежними від електронної системи керування. З'єднаний з ротором двигуна, давач кута повороту ротора посилає в електронну систему керування магнітним потоком сигнал про дійсний кут повороту. Завдяки ПІ - регулятору швидкості і ПІ-регулятору струму, система керування потоком прискорює обертання вектора потоку при зростанні значення заданої швидкості nзавд. З другого боку, вектор потоку змінює свій напрям, щоб ротор встигав за потоком. Через це двигун має, в принципі, такі ж властивості, як двигун постійного струму, в якому напрям потоку поля ротора співпадає з напрямом обертання ротора.
Механічна характеристика. Діапазон зміни швидкості обертання складає від -5000 об/хв до +5000 об/хв (рис. 4.31). Такі двигуни можна навантажувати номінальним моментом Мn у всьому діапазоні обертання. Для реалізації великих прискорень, двигуни такого типу можуть створювати короткочасні (0,3-0,5с) обертові моменти величиною від 3Мn до 5Мn.
 У обмотці статора є вмонтований резистор, який служить як давач температури і контролює перегрів двигуна. Такі двигуни виконуються як самоохолоджувальні і закриті у корпусі, який задовольняє вимогам IP65.
У обмотці статора є вмонтований резистор, який служить як давач температури і контролює перегрів двигуна. Такі двигуни виконуються як самоохолоджувальні і закриті у корпусі, який задовольняє вимогам IP65.
Часто цей вид двигуна виготовлюється як двигун високої напруги з робочою напругою 600 В. У зв'язку з вищою напругою, значення струму є нижчими, а через те також менші перерізи провідників. У високовольтному виконанні в допоміжному колі постійного струму постійна напруга 600 В створюється безпосередньо з трифазної мережі випрямлячем - без необхідності застосування трансформатора.
 Привод з асинхронним двигуном і векторним керуванням поля статора. Асинхронний двигун змінного струму, завдяки електронній комутації, уможливлює реалізацію системи регулювання швидкості обертання з великою швидкодією. Подібно як при електронній комутації трифазного синхронного двигуна, тут відбувається керування напрямом потоку магнітного поля статора залежно від миттєвого положення ротора. Електронне керування потоком поля є відносно дороге і вимагає застосування дуже потужного мікропроцесора (рис.4.32). Асинхронні двигуни змінного струму застосовуються перш за все як головні приводи у верстатах. Шляхом ослаблення поля при зменшеному моменті в цих двигунах можна отримати надвисокі швидкості обертання, наприклад до 20000 об/хв. Отже його можна застосовувати, в приводах без коробки передачі, у фрезерних верстатах для фрезерування фрезами з великими діаметрами при низьких швидкостях обертання, а також при свердлінні отворів з малими діаметрами при великих швидкостях обертання.
Привод з асинхронним двигуном і векторним керуванням поля статора. Асинхронний двигун змінного струму, завдяки електронній комутації, уможливлює реалізацію системи регулювання швидкості обертання з великою швидкодією. Подібно як при електронній комутації трифазного синхронного двигуна, тут відбувається керування напрямом потоку магнітного поля статора залежно від миттєвого положення ротора. Електронне керування потоком поля є відносно дороге і вимагає застосування дуже потужного мікропроцесора (рис.4.32). Асинхронні двигуни змінного струму застосовуються перш за все як головні приводи у верстатах. Шляхом ослаблення поля при зменшеному моменті в цих двигунах можна отримати надвисокі швидкості обертання, наприклад до 20000 об/хв. Отже його можна застосовувати, в приводах без коробки передачі, у фрезерних верстатах для фрезерування фрезами з великими діаметрами при низьких швидкостях обертання, а також при свердлінні отворів з малими діаметрами при великих швидкостях обертання.
Переваги асинхронних двигунів з електронною комутацією подібні до переваг синхронного двигуна:
· малі витрати на обслуговування і експлуатацію;
· високий ККД;
· велика швидкодія;
· малі розміри;
· стійкість до короткочасних, навіть 10-кратних перевантажень;
· двигун відповідає вимогам ІП 65.
Характеристики. Асинхронний двигун змінного струму з електронною комутацією має в нижньому діапазоні швидкості обертання постійний обертовий момент і лінійне зростання потужність при зростанні швидкості обертання (рис.4.33). У верхньому діапазоні швидкості обертання максимальний момент є обернено пропорційний до швидкості обертання. У цьому діапазоні швидкості обертання потужність, що віддається, є постійною. При застосуванні цих двигунів в головних приводах, завдяки ослабленню поля, можна отримати швидкості обертання до 20000 об/хв.
 Трифазні асинхронні двигуни з внутрішнім водяним охолодженняммають розміри приблизнона40% менші порівняно з двигунами з повітряним охолодженням. Охолоджувальна вода обтікає корпус двигуна і обмежує тим самим нагрівання двигуна. Це забезпечує в т.ч. високу точність обробки, тому що усувається дія зовнішніх джерел тепла верстатів. Охолоджувальна вода протікає в замкненому контурі, до складу якого входять помпа і теплообмінник.
Трифазні асинхронні двигуни з внутрішнім водяним охолодженняммають розміри приблизнона40% менші порівняно з двигунами з повітряним охолодженням. Охолоджувальна вода обтікає корпус двигуна і обмежує тим самим нагрівання двигуна. Це забезпечує в т.ч. високу точність обробки, тому що усувається дія зовнішніх джерел тепла верстатів. Охолоджувальна вода протікає в замкненому контурі, до складу якого входять помпа і теплообмінник.
 Багатодвигунний привід. Як правило у верстаті знаходиться декілька двигунів змінного струму з регульованою швидкістю обертання. Наприклад, у верстаті з числовим керуванням є один трифазний асинхронний двигун для приводу головного шпинделя і два трифазні синхронні двигуни для приводу механізмів подачі. У цьому випадку всі три двигуни потребують постійний струм для імпульсних перетворювачів. Отже доцільним є таке рішення, щоб допоміжний контур постійного струму використовувався спільно для всіх трьох двигунів (рис. 4.34). Очевидною вимогою тут є однакова напруга для всіх трьох двигунів, наприклад 600 В. Через магістральну систему можна контролювати і керувати трьома імпульсними перетворювачами, контурами регулювання швидкості і контурами регулювання струму. Магістральний комплекс і місця під'єднань допоміжних контурів постійного струму розміщені каскадно, тобто окремі комплекси-модулі можна з'єднувати за допомогою рознімів.
Багатодвигунний привід. Як правило у верстаті знаходиться декілька двигунів змінного струму з регульованою швидкістю обертання. Наприклад, у верстаті з числовим керуванням є один трифазний асинхронний двигун для приводу головного шпинделя і два трифазні синхронні двигуни для приводу механізмів подачі. У цьому випадку всі три двигуни потребують постійний струм для імпульсних перетворювачів. Отже доцільним є таке рішення, щоб допоміжний контур постійного струму використовувався спільно для всіх трьох двигунів (рис. 4.34). Очевидною вимогою тут є однакова напруга для всіх трьох двигунів, наприклад 600 В. Через магістральну систему можна контролювати і керувати трьома імпульсними перетворювачами, контурами регулювання швидкості і контурами регулювання струму. Магістральний комплекс і місця під'єднань допоміжних контурів постійного струму розміщені каскадно, тобто окремі комплекси-модулі можна з'єднувати за допомогою рознімів.
 Двигуни постійного струму. Двигун постійного струму має на статорі обмотку, яка створює магнітний потік від одного полюса до другого або полюси, виготовлені з використанням постійних магнітів (рис. 4.35). Якір має обмотку, як правило, розкладену в пазах. Якщо петлі обмоток якоря приєднані до комутатора (колектор з вугільними щітками) таким чином, що підведений через щітки струм, наприклад в правій половині котушки безперервно тече „в площину ", а витікає - з лівої половини. Через це виникає
Двигуни постійного струму. Двигун постійного струму має на статорі обмотку, яка створює магнітний потік від одного полюса до другого або полюси, виготовлені з використанням постійних магнітів (рис. 4.35). Якір має обмотку, як правило, розкладену в пазах. Якщо петлі обмоток якоря приєднані до комутатора (колектор з вугільними щітками) таким чином, що підведений через щітки струм, наприклад в правій половині котушки безперервно тече „в площину ", а витікає - з лівої половини. Через це виникає  незалежний від положення якоря, постійний магнітний потік. Залежно від способу створення поля статора, розрізняються двигуни: з паралельним, послідовним і змішаним збудженням, або із збудженням від постійних магнітів (рис. 4.36). Двигун постійного струму з послідовним збудженням, має, як правило, великий пусковий момент. Він застосовується як стартер у вантажних автомобілях і електричних приводах потягів.
незалежний від положення якоря, постійний магнітний потік. Залежно від способу створення поля статора, розрізняються двигуни: з паралельним, послідовним і змішаним збудженням, або із збудженням від постійних магнітів (рис. 4.36). Двигун постійного струму з послідовним збудженням, має, як правило, великий пусковий момент. Він застосовується як стартер у вантажних автомобілях і електричних приводах потягів.
 Двигуни постійного струму з великим діапазоном зміни швидкості обертання застосовуються переважно двигуни з послідовним збудженням або із збудженням від постійних магнітів. В обох випадках магнітний потік є постійним, а для зміни швидкості обертання використовується напруга якоря UM Характеристика „обертовий момент /швидкість обертання" переміщається паралельно (рис. 4.37) і швидкість обертання є пропорційна до напруги якоря. При постійній напрузі якоря UM обертовий момент зменшується в міру зростання швидкості обертання. Струм ротора І є пропорційним до рушійного моменту М. Такі лінійні залежності створюють хороші умови для регулювання і керування роботою двигуна.
Двигуни постійного струму з великим діапазоном зміни швидкості обертання застосовуються переважно двигуни з послідовним збудженням або із збудженням від постійних магнітів. В обох випадках магнітний потік є постійним, а для зміни швидкості обертання використовується напруга якоря UM Характеристика „обертовий момент /швидкість обертання" переміщається паралельно (рис. 4.37) і швидкість обертання є пропорційна до напруги якоря. При постійній напрузі якоря UM обертовий момент зменшується в міру зростання швидкості обертання. Струм ротора І є пропорційним до рушійного моменту М. Такі лінійні залежності створюють хороші умови для регулювання і керування роботою двигуна.
У приводах без автоматичного регулювання можна змінювати швидкість обертання шляхом зміни напруги двигуна у відношенні приблизно 1:100. Застосовуючи систему регулювання, можна добитися досить низької швидкості обертання. Зміна напряму обертання досягається шляхом зміни напряму струму в роторі або в обмотці збудження. Цей вид двигунів постійного струму працює завжди у поєднанні з тиристорним або транзисторним перетворювачем як підсилювачем потужності. Крім механічної характеристики (обертовий момент/швидкість обертання), важливу роль відіграє динаміка зміни швидкості обертання, тобто швидкість реакції.
Після стрибкоподібної зміни напруги живлення двигуна швидкість обертання не змі нюються стрибкоподібно, а згідно з степеневою функцією (рис.4.38). Динамічні властивості характеризує електромеханічна стала часу Тм. Вона є пропорційна до моменту інерції J, а також обернено пропорційна до нахилу характеристики (ΔM/Δn). Після стрибкоподібної зміни напруги двигуна, наприклад, після вмикання двигуна, він досягає біля 64% своєї номінальної швидкості обертання через час t = Tм. Номінальна швидкість обертання досягається за час t ≈ 3 Tм. Механічна стала часу Тм для двигунів спеціальної конструкції при потужності 2 кВт складає від 4 мс до 40 мс. Що стосується зміни інерційного навантаження у приводній машині, механічна
нюються стрибкоподібно, а згідно з степеневою функцією (рис.4.38). Динамічні властивості характеризує електромеханічна стала часу Тм. Вона є пропорційна до моменту інерції J, а також обернено пропорційна до нахилу характеристики (ΔM/Δn). Після стрибкоподібної зміни напруги двигуна, наприклад, після вмикання двигуна, він досягає біля 64% своєї номінальної швидкості обертання через час t = Tм. Номінальна швидкість обертання досягається за час t ≈ 3 Tм. Механічна стала часу Тм для двигунів спеціальної конструкції при потужності 2 кВт складає від 4 мс до 40 мс. Що стосується зміни інерційного навантаження у приводній машині, механічна  стала часу суттєво змінюється в двигунах з стрижневими і дисковими якорями. Враховуючи велику власну обертову масу, в кліткових двигунах ці зміни невеликі.
стала часу суттєво змінюється в двигунах з стрижневими і дисковими якорями. Враховуючи велику власну обертову масу, в кліткових двигунах ці зміни невеликі.
Приводи з особливо великою швидкодією (серводвигуни) характе ризуються малою обертовою масою і відносно дуже крутою характеристикою. Мала обертова маса досягається за допомогою тонких стрижневих якорів (двигуни з видовженими якорями) або неметалевих якорів у вигляді диска (двигуни з дисковими якорями) (рис. 4.39 і рис.4.40). Двигуни з дисковими якорями, враховуючи їхнє співвідношення розмірів і малий момент інерції, часто застосовуються в приводних комплексах роботів.
ризуються малою обертовою масою і відносно дуже крутою характеристикою. Мала обертова маса досягається за допомогою тонких стрижневих якорів (двигуни з видовженими якорями) або неметалевих якорів у вигляді диска (двигуни з дисковими якорями) (рис. 4.39 і рис.4.40). Двигуни з дисковими якорями, враховуючи їхнє співвідношення розмірів і малий момент інерції, часто застосовуються в приводних комплексах роботів.
Керування швидкістю обертання. Керування швидкістю обертання в двигунах постійного струму відбувається за допомогою зміни напруги на якорі двигуна UM. Для цього потрібне джерело постійної напруги з великою потужністю на виході. Такі джерела живлення будуються за використання тиристорів або транзисторів (рис. 4.41). Розрізняють роботу одно, двох і чотириквадрантну. Під поняттям одноквадрантна роботарозуміють роботу двигуна, під час якої він може бути керованим тільки в одному напрямку (рис. 4.42). Джерело живлення створює напругу тільки однієї полярності. Зміна напрямку обертання може відбутися після зміни полярності напруги на двигуні за допомогою контактора. Під час двоквадрантної роботи є можлива зміна напрямку обертання без необхідності зміни полярності. Джерело живлення створює додатну і від'ємну напругу. Під час чотириквадрантної роботи двигун може бути приводним і гальмівним в обох напрямах обертання. Під час гальмування двигун працює як генератор. Індукована в обмотці якоря напруга є вища, ніж напруга живлення, отримувана від джерела живлення. Через це струм протікає при додатній полярності на двигуні від двигуна до джерела живлення. Чотириквадрантна роботи можлива тільки тоді, коли джерело живлення здатне і сприймати струм, що тече від двигуна, і віддавати його в мережу. Системи з відбором енергії при чотириквадрантній роботі застосовуються у потужних приводах, наприклад, в приводах вальцювальних станів, де часто відбувається пуск, гальмування і зміна швидкості обертання. Енергія, створена двигуном в процесі гальмування, в джерелі живлення перетворюється в теплові втрати. Тому джерела живлення приводів переміщення потребують хорошого охолодження повітрям.
 Крокові двигуни. Крокові двигуни застосовуються в позиційних приводах, наприклад, при виставлянні друкарських головок в принтерах або для транспортування паперу у плотерах. Кроковий двигун при кожному керувальному імпульсі обертається на один кутовий крок.
Крокові двигуни. Крокові двигуни застосовуються в позиційних приводах, наприклад, при виставлянні друкарських головок в принтерах або для транспортування паперу у плотерах. Кроковий двигун при кожному керувальному імпульсі обертається на один кутовий крок.
Принцип дії. Якщо струм протікатиме по черзі через котушки 1, 2, 3, 1, 2, 3..., то ротор з двома виступами буде розміщатися по порядку в магнітному полі кожної котушки (рис.4.43). Після трьох кроків він повернеться на 180°, а після шести кроків на весь оборот. Якщо котушки будуть збуджуватися за черговістю 1, 1 +2. 2, 2+3. 3 і т.д., то тоді, при подвійному збудженні (двох котушок), ротор займе середнє положення між двома полюсами. Тепер для здійснення одного обороту треба 2х6=12 кроків. Збудження котушок за черговістю 1, 1 +3, 3, 3+2, 2 і т.д. спричинить обертання ротора в протилежному напрямі.
 Будова. На відміну від рисунка, який ілюструє принцип побудови двигуна з трьома збуджувальними обмотками і двома полюсами, крокові двигуни мають, як правило, статор з п'ятьма збуджувальними обмотками, кожна з 16 полюсними наконечниками. Ці 16 полюсних наконечників кожної обмотки взаємно зміщені на 1/5 частину - ротор має 5 • 16 = 80 полюсних наконечників. Якщо збуджувати котушки за черговістю 1, 2, 3, 4, 5, 1, то ротор виконає 5 • 16 = 80 кроків і повернеться на повний оберт. Шляхом одночасного збудження 2 або 3 обмоток статора кожен раз досягається середнє положення між двома полюсами і через це кількість кроків за один оборот подвоюється.
Будова. На відміну від рисунка, який ілюструє принцип побудови двигуна з трьома збуджувальними обмотками і двома полюсами, крокові двигуни мають, як правило, статор з п'ятьма збуджувальними обмотками, кожна з 16 полюсними наконечниками. Ці 16 полюсних наконечників кожної обмотки взаємно зміщені на 1/5 частину - ротор має 5 • 16 = 80 полюсних наконечників. Якщо збуджувати котушки за черговістю 1, 2, 3, 4, 5, 1, то ротор виконає 5 • 16 = 80 кроків і повернеться на повний оберт. Шляхом одночасного збудження 2 або 3 обмоток статора кожен раз досягається середнє положення між двома полюсами і через це кількість кроків за один оборот подвоюється.
Робочі характеристики. При малій швидкості обертання (до 20 кроків на секунду) чітко виявляється кроковий характер руху. В залежності від обертової маси ротора, при зростанні частоти тактування кроків, наступає все більше „згладжування" обертання. Старт відразу з високою частотою також неможливий. Максимальна частота старту /зупинки складає біля 2000 кроків за секунду. Якщо тактування повинно відбуватися швидше, то необхідно повільно збільшувати частоту кроків.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 3168; Нарушение авторских прав?; Мы поможем в написании вашей работы!