КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Загальні відомості про промислові адаптивні роботи
|
|
|
|
Адаптивні роботи. Гідро-, пнемо-, електропривод промислових роботів.
Лекція № 19
1 Загальні відомості про промислові адаптивні роботи.
2 Структура адаптивних роботів.
3 Типи приводів промислових роботів.
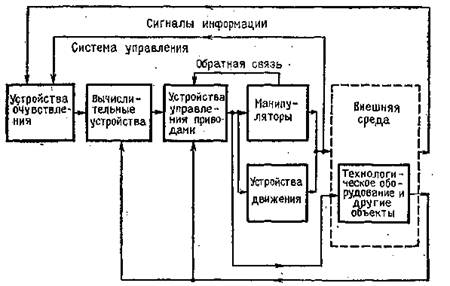 Адаптивні промислові роботи - це роботи, які можуть самостійно орієнтуватися в не цілком певній обстановці. Вони реагують за допомогою будь-яких технічних засобів на ті або інші чинники неозначеної обстановки і пристосовують до них свої дії при виконанні технологічного завдання. Іншими словами, відчувши тим або іншим способом стан середовища, робот повинен автоматично сформувати сукупність сигналів управління на приводи свого маніпулятора, щоб той виконав задану технологічну операцію, не дивлячись на те, що є невизначеності у зовнішній обстановці (мал. 1).
Адаптивні промислові роботи - це роботи, які можуть самостійно орієнтуватися в не цілком певній обстановці. Вони реагують за допомогою будь-яких технічних засобів на ті або інші чинники неозначеної обстановки і пристосовують до них свої дії при виконанні технологічного завдання. Іншими словами, відчувши тим або іншим способом стан середовища, робот повинен автоматично сформувати сукупність сигналів управління на приводи свого маніпулятора, щоб той виконав задану технологічну операцію, не дивлячись на те, що є невизначеності у зовнішній обстановці (мал. 1).
Малюнок 1 – Схема управління адаптивним роботом
Якого характеру невизначеності тут маються на увазі? Допустимо, що деталь, яку повинен узяти робот, орієнтована неточно: може лежати неточно в даному місці або рухається на конвеєрі. При жорсткій програмі, як описано в попередньому параграфі, робот не зможе узяти таку деталь - він повинен спочатку дізнатися її дійсне положення і визначити, як її краще узяти.
Адаптивні ПР забезпечують активну цілеспрямовану взаємодію з реальним зовнішнім середовищем на основі інформації про її стан, про стан і функціонування окремих вузлів і підсистем робота і його виконавчих органів. Управляюча програма адаптивного ПР не містить повного набору необхідної інформації; її недостатня частина формується під час функціонування ПР на основі аналізу виконуваних дій і контролю вимірюваних параметрів зовнішнього середовища, а також стану вузлів і підсистем Ін. Характер і структура цієї інформації визначаються функціональним призначенням робота, змістом виробничого завдання і умовами роботи, рівнем автономності дій ПР, потребами техніка безпеки і іншими чинниками.
Всю інформацію, потрібну для управління ПР, можна поділити на інформацію про параметри зовнішнього середовища, з яким взаємодіє робот, і на інформацію про внутрішній стан самого робота. Збір, первинна обробка і передача інформації в систему управління забезпечуються інформаційною системою. Формування адаптивних програм і алгоритмів управління повинне встановлювати функціональні зв'язки даними про роботу вузлів і підсистем ПР (ці параметри безпосередньо регулюються за допомогою СПУ) і контрольованими даними про стан окремих параметрів зовнішнього середовища. Ступінь складності цих функціональних зв'язків визначається конкретним виробничим завданням: це може бути просте блокування дій ПР або розподілена програма його роботи. Висока технологічна гнучкість і можливість оперативної перебудови програм виконуваних дій дозволяють адаптивним ПР вирішувати більшість завдань, не доступних для жорсткопрограмованих роботів.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 425; Нарушение авторских прав?; Мы поможем в написании вашей работы!