КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Увод» с упреждением
|
|
|
|
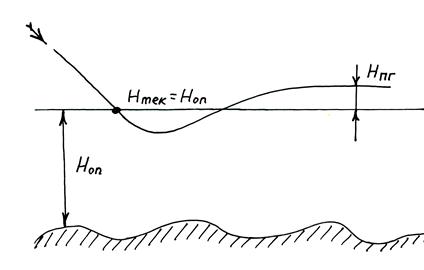
Увод» без упреждения
Закон управления:


где: 
 .
.
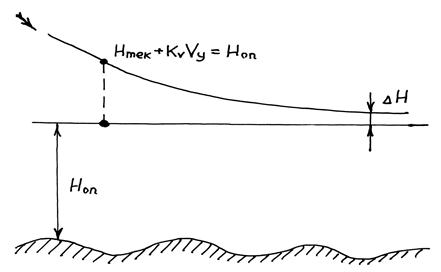
Таким образом, включается режим приведения к горизонту с заданным углом наклона траектории, выводящим самолет из опасной зоны, а после выполнения условия  система переходит в режим стабилизации высоты.
система переходит в режим стабилизации высоты.
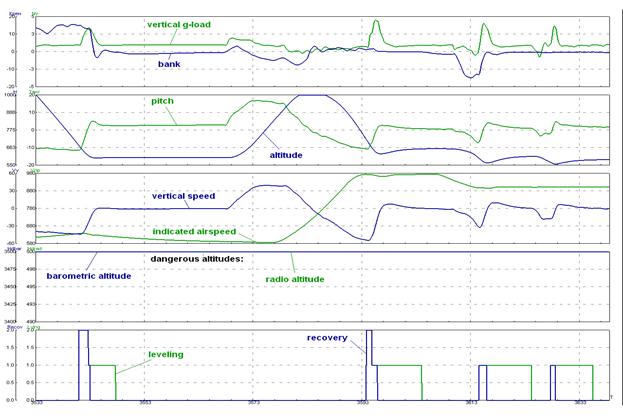
Осциллограмма режима «увод от опасной высоты»
Осциллограмма режима «увод от опасной высоты»
с бортового самописца
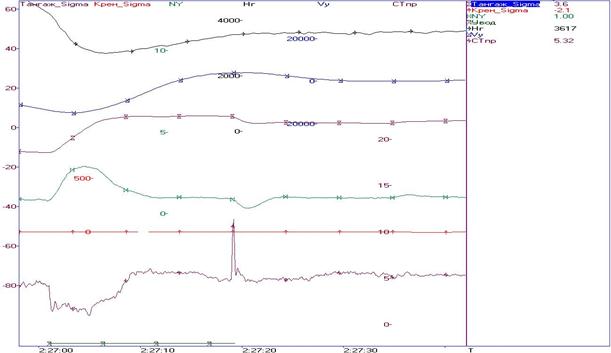
Включение режима по индикации на пилотажном кадре

| 
|
Включение режима по индикации на ИКШ

Режим «Огибание рельефа местности»
(автоматизация маловысотного полета)
Полет на малой высоте возможен, если известна истинная высота над пролетаемой местностью и расстояние до препятствий на впереди лежащем рельефе. Необходимо измерять наклонную дальность, чтобы из нее получить упрежденную высоту полета  - высоту лежащих впереди препятствий.
- высоту лежащих впереди препятствий.
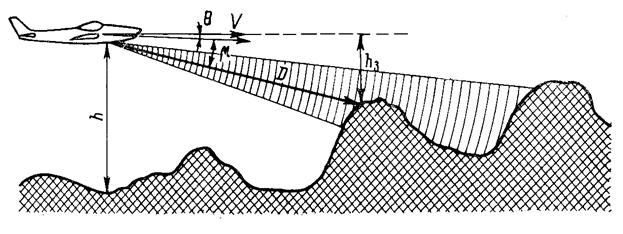
Принцип действия радиодальномера
 ,
,
где:  - наклонная дальность;
- наклонная дальность;
 - упрежденная высота полета;
- упрежденная высота полета;
 - угол наклона антенны впередсмотрящего локатора.
- угол наклона антенны впередсмотрящего локатора.
Автоматическое управление при облете препятствий строится на стабилизации наклонной дальности или стабилизации упрежденной высота полета. При уменьшении наклонной дальности ниже допустимого предела самолет должен увеличивать высоту полета с целью облета препятствия. Недостатком подобного способа является «выброс» высоты (кривая 1).
Для устранения этого недостатка необходимо обеспечить облет препятствия так, чтобы над вершиной траектория полета была горизонтальной (кривая 2). Таким образом, алгоритм должен быть «сшит» из четырех условий:
- при полете над ровной местностью стабилизируется наклонная дальность:
 ;
;
- после потери луча радиодальномера стабилизируется угол наклона траектории:
 ,
,
где:  - запомненное значение
- запомненное значение  в момент потери луча.
в момент потери луча.
Угол наклона траектории стабилизируется до точки А, которая характеризуется моментом времени  , где
, где  - запомненное значение наклонной дальности в момент потери луча;
- запомненное значение наклонной дальности в момент потери луча;
- после прохождения точки А стабилизируется  , т.е. самолет начинает снижаться;
, т.е. самолет начинает снижаться;
- после появления сигнала наклонной дальности система снова переходит на режим ее стабилизации:
.
Переключения осуществляются логическим устройством, реализованным в БЦВМ управления полетом.
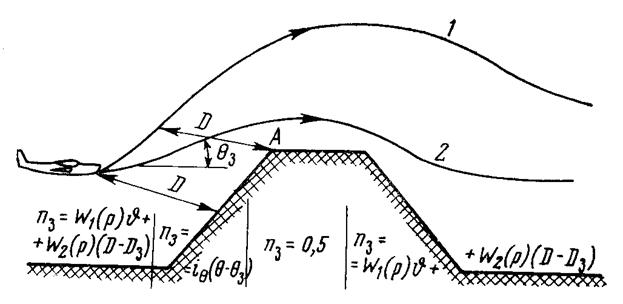
Траектория облета препятствий и требуемые законы управления
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1160; Нарушение авторских прав?; Мы поможем в написании вашей работы!