КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Цифровой (дискретный) ЛКР-регулятор
|
|
|
|
Кроме того, возможно определение коэффициентов  для цифрового ЛКР-регулятора, исходя из квадратичного критерия качества
для цифрового ЛКР-регулятора, исходя из квадратичного критерия качества
 , (2а)
, (2а)
где Q и R симметричные неотрицательно определенные весовые матрицы.
Матрица Q определяет стоимость штрафа, назначаемого за отклонение переменных состояния относительно их знчений в состоянии равновесия. Матрица R определяет стоимость штрафа, наначаемого за величину (уровень) управляющего воздействия. Эти матрицы устанавливаются пректировщиком системы. Цель управления принудить переменные состояния быть как можно ближе к нулю, в то время как штрафуется управляющее воздействие.
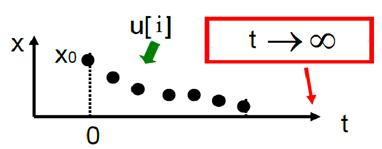
Итак, задача цифрового ЛКР управления заключается в том, чтобы найти такое управление u [ i ] (см. рис. ниже), которое минимизирует критерий качества  при условии, что объект управления описыватся уравнением
при условии, что объект управления описыватся уравнением

и задано начальное состояние  .
.
Оптимальное решение представляет собой обатную связь по состоянию
 ,
,
где векторный коэффициент обратной связи по состоянию имеет вид
 .
.
В последнем выражении матрица P является решением линейного алгебраического разностного уравнения
 .
.
При этом замкнутая система независимо от выбора весовых матриц является устойчивой, т.е. все собственные значения матрицы замкнутой системы  имеют модули, меньшие единицы и значение оптиального критерия качества равно
имеют модули, меньшие единицы и значение оптиального критерия качества равно  . Итак, минимизирует
. Итак, минимизирует
 .
.
Пример. 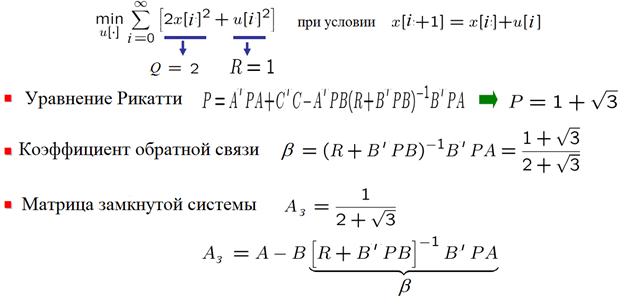
При объектах высокого порядка для определения P и  целесообразно применить команду dlqr системы MATLAB.
целесообразно применить команду dlqr системы MATLAB.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 657; Нарушение авторских прав?; Мы поможем в написании вашей работы!