КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение задачи
|
|
|
|
Обычно порядок желаемой системы ниже порядка объекта управления, т.е.
 .
.
Поэтому для удовлетворения условия (103) нужно так выбрать  , чтобы скомпенсировать все или часть нулей и полюсов передаточной функции
, чтобы скомпенсировать все или часть нулей и полюсов передаточной функции  объекта управления.
объекта управления.
Рассмотрим лишь компенсацию нулей объекта управления, т.е. нулей многочлена  . С этой целью разложим этот многочлен на множители
. С этой целью разложим этот многочлен на множители
 , (104)
, (104)
где все нули  лежат внутри окружности единичного радиуса, а все нули
лежат внутри окружности единичного радиуса, а все нули  - вне нее. Чтобы такое разложение было единственным, положим коэффициент при старшем члене
- вне нее. Чтобы такое разложение было единственным, положим коэффициент при старшем члене  равным единице. Нетрудно показать, что стремление скомпенсировать нули объекта, расположенные вне окружности единичного радиуса, т.е. стремление сократить множитель
равным единице. Нетрудно показать, что стремление скомпенсировать нули объекта, расположенные вне окружности единичного радиуса, т.е. стремление сократить множитель  , приводит к неустойчивой системе, действительно, в соответствии с (99) такие нули могут быть скомпенсированы, если множитель
, приводит к неустойчивой системе, действительно, в соответствии с (99) такие нули могут быть скомпенсированы, если множитель  является сомножителем
является сомножителем  , т.е. если
, т.е. если
 ,
,
а следовательно, сомножителем характеристического многочлена проектируемой системы
 . (105)
. (105)
При этом характеристическое уравнение проектируемой системы
 ,
,
содержит корни, по модулю большие единицы, что говорит о неустойчивости такой системы. Как видим, нельзя сокращать многочлен  и поэтому он должен быть сомножителем числителя желаемой передаточной функции, т.е.
и поэтому он должен быть сомножителем числителя желаемой передаточной функции, т.е.
 , (106)
, (106)
В отношении нулей объекта, расположенных внутри окружности единичного радиуса, ограничений не существует и, следовательно, их можно скомпенсировать. Так, включив в  сомножитель
сомножитель  , т.е. представив
, т.е. представив  в виде
в виде
 , (107)
, (107)
добиваемся сокращения всех нулей объекта, имеющих модуль, меньший единицы, действительно, подставляя (104) и (107) в (99), получаем
 .
.
При этом условие (101) сводится к двум уравнениям синтеза
 , (108)
, (108)
 (109)
(109)
Заметим, что характеристический многочлен спроектированной системы
 ,
,
включает в себя компенсированные нули объекта, т.е. многочлен , полюсы желаемой системы, т.е. характеристический многочлен желаемой системы  , и полюсы наблюдателя, т.е. характеристический многочлен
, и полюсы наблюдателя, т.е. характеристический многочлен  .
.
Итак, при заданной передаточной функции желаемой системы и выбранном многочлене  многочлены
многочлены  и
и  должны обращать в тождество уравнение (108), а многочлен
должны обращать в тождество уравнение (108), а многочлен  должен удовлетворять уравнению (109).
должен удовлетворять уравнению (109).
Так как  и
и  не имеют общих делителей, то из теории полиномиальных уравнений следует, что:
не имеют общих делителей, то из теории полиномиальных уравнений следует, что:
а) существует единственное решение уравнения (108), удовлетворяющее условию
 ;
;
б) на основе этого единственного решения можно построить сколь угодно много решений, при этом все решения дают одинаковую передаточную функцию
 ,
,
связывающую выходной сигнал системы и задающее воздействие, что позволяет из этого множества выбрать решение, удовлетворяющее другим ограничениям, накладываемым на допустимое управление.
Физически осуществимое управление. Можно показать, что физически осуществимое решение задачи синтеза, т.е. решение, удовлетворяющее условиям (100), имеет место, если выполняются неравенства
 , (110)
, (110)
 , (111)
, (111)
Первое из этих условий означает, что инерционность желаемой системы должна быть не меньше инерционности объекта управления, а из второго условия вытекает, что для получения физически осуществимого управления степень многочлена наблюдателя должна быть достаточно большой.
Включение в обратную связь дискретных интеграторов. Как уже было показано при рассмотрении исходных данных, для обеспечения малой чувствительности системы к низкочастотным возмущениям и неточности модели объекта управления на низких частотах достаточно выбрать многочлен  в виде
в виде
 .
.
При этом легко убедиться, что если выполняется условие (110) и имеет место неравенство
 ,
,
то выполняются условия физической осуществимости  и
и  . Таким образом, при включении интегратора в обратную связь степень многочлена наблюдателя должна быть увеличена на единицу по сравнению с (111).
. Таким образом, при включении интегратора в обратную связь степень многочлена наблюдателя должна быть увеличена на единицу по сравнению с (111).
Одной из основных проблем рассматриваемого метода является решение линейного полиномиального уравнения
 , (112)
, (112)
или
 , (113)
, (113)
что можно сделать следующим образом. Ввести многочлены  и
и  заданной степени с неопределенными коэффициентами и затем приравнять коэффициенты при одинаковых степенях z в левой и правой частях уравнения (112). В результате получается совокупность q линейных алгебраических уравнений, где
заданной степени с неопределенными коэффициентами и затем приравнять коэффициенты при одинаковых степенях z в левой и правой частях уравнения (112). В результате получается совокупность q линейных алгебраических уравнений, где
 ,
,
решая которую находим коэффициенты многочленов  и
и  . Заметим, что заданная степень этих многочленов определяется соотношениями
. Заметим, что заданная степень этих многочленов определяется соотношениями
 , (114)
, (114)
 , (115)
, (115)
где  =0 или
=0 или  =1 в случае отсутствия или включения интегратора в обратную связь.
=1 в случае отсутствия или включения интегратора в обратную связь.
Заметим, что если q > 4, целесообразно использовать машинные методы решения системы линейных алгебраических уравнений.
Пример. Пусть объектом управления является электрический двигатель с передаточной функцией

связывающей угол поворота вала двигателя и напряжение, поступающее на его вход. Найдем передаточную функцию этого двигателя, управляемого от ЦВМ,

где
 .
.
Следовательно,

Предположим, что желаемая передаточная функция имеет вид
 .
.
и ее знаменатель соответствует знаменателю дискретной передаточной функции колебательного звена с непрерывной ПФ  при
при  =1 и
=1 и  =0,7. Период дискретизации T= 0,25c.
=0,7. Период дискретизации T= 0,25c.
Передаточная функция  содержит нуль
содержит нуль  ,
,  который не входит в передаточную функцию желаемой системы. Поэтому необходимо его исключить.
который не входит в передаточную функцию желаемой системы. Поэтому необходимо его исключить.
Шаг 1. Разложим  на множители
на множители  . При этом согласно (106)
. При этом согласно (106)
 ,
,
где
 .
.
Степень многочлена  определяется неравенством (111). Полагая
определяется неравенством (111). Полагая  =0 и учитывая, что
=0 и учитывая, что
 ,
,
получаем

Выберем  , так что
, так что
 .
.
Тогда степени многочленов  и
и  в соответствии с (111) и (112) будут равны
в соответствии с (111) и (112) будут равны
 ,
,
 .
.
Принимаем
 ,
,
где  - неопределенные коэффициенты.
- неопределенные коэффициенты.
Шаг 2. С учетом принятых выражений для  и
и  уравнение синтеза (106) можно записать как
уравнение синтеза (106) можно записать как
 .
.
Приравнивая коэффициенты при одинаковых степенях z, получаем систему уравнений, решение которой имеет вид
 .
.
Шаг 3. Из уравнения (109) и (107) следует, что
 .
.
Отсюда в соответствии с (97) получаем z – преобразование управления
 .
.
При этом закон управления можно записать в следующем виде:
 .
.
Реакция спроектированной системы на ступенчатое воздействие показана на рис. 22.
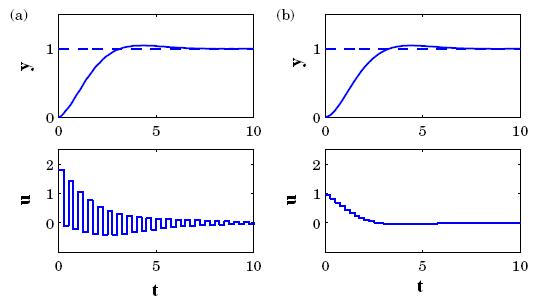
Рис. 22
(а) Нуль объекта компенсируется; (b) Нуль объекта не компенсируется.
Как видим, в управляющем сигнале наблюдается «дрожание» или «рябь», вызванная компенсацией нуля, лежащего на отрицательной вещественной оси. В моменты дискретизации эта рябь не видна в выходном сигнале. Однако когда период дискретизации достаточно большой, рябь проявляется в выходном сигнале между моментами дискретизации. Можно показать, что включение нуля в желаемую передаточную функцию, другими словами, отказ от компенсации нуля, позволяет избавиться от ряби в выходном сигнале ценой небольшого снижения быстродействия.
Заметим, что в цифровых системах мы можем добиться бесконечной степени устойчивости (другими словами, можем расоложить все полюсы системы в начале координат), чего нельзя сделать применительно к непрерывным системам.
Рассмотрим замкнутую цифровую систему с ПФ

Все полюсы такой системы расположены в z= 0, что говорит о том, что переходный процесс заканчивается за конечное время, равное четырем периодам дискретизации, 4 T.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 318; Нарушение авторских прав?; Мы поможем в написании вашей работы!