КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Малые колебания физического и математического маятников
|
|
|
|
Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси
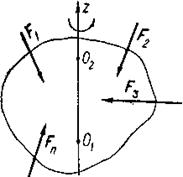
Пусть твердое тело вращается вокруг неподвижной оси под действием внешних сил F1, F2,…,Fn (рис. 114). В этом случае тело имеет одну степень свободы (k =1) и за обобщенную координату примем угол поворота (q=φ).
Кинетическая энергия тела будет
где Iz — момент инерции тела относительно оси вращения z.
Обобщенную силу Q найдем из формулы

где Мz — главный момент приложенных к телу внешних сил относительно оси z. Имеем
Q=Mz.
Подставляя в уравнение Лагранжа
получим дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси
I 2Ф = М2. | Ш.218
2Ф = М2. | Ш.218
Предлагаем читателю самостоятельно вывести дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси на основании теоремы об изменении кинетического момента
 где по (111.97) Lz=Izω
где по (111.97) Lz=Izω
Физическим маятником называется твердое тело любой формы, имеющее горизонтальную ось вращения, не проходящую через центр тяжести тела, называемую осью привеса.
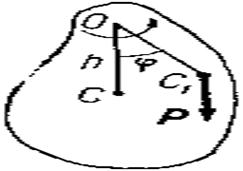
Рассмотрим движение физического маятника под действием силы тяжести Р (рис. 115). В соответствии с (111.218) дифференциальное уравнение движения физического маятника будет
где IO — момент инерции маятника относительно оси вращения О,
h — расстояние центра инерции С от оси вращения (длина физического маятника).
При малых колебаниях маятника или при малых углах отклонения φ можно принять sin φ ≈ φ, тогда
или

где 
Интегрируя это уравнение, найдем

Постоянные интегрирования С1 и С2 определим из начальных условий движения. Например, пусть при t = 0, φ0=α, φ0=0.
Тогда
φ=α coskt
Следовательно, под действием силы тяжести (без учета силы сопротивления среды) маятник совершает гармонические колебания. Частота этих колебаний

Период Т малых колебаний физичесйого маятника равен
Формула (111.222) может быть использована для опытного определения момента инерции твердого тела.
Математический маятник представляет собой несвободную тяжелую материальную точку М, соединенную с горизонтальной осью вращения (осью привеса) z гибкой нерастяжимой невесомой нит (или абсолютно жестким невесомым стержнем), движущуюся в вертикальной плоскости. Расстояние материальной точки от оси вращения называется длиной математического маятника.
Пусть вес математического маятника равен Р, а длина — l. Рассматривая математический маятник как частный случай физического маятника, применим для вывода дифференциального уравнения движения математического маятника уравнение (111.219), в котором

Тогда получим
или 
Таким образом, движение математического маятника описывается дифференциальным уравнением, аналогичным уравнению движения физического маятника.
Для круговой частоты колебаний /с и периода колебаний Т математического маятника получим

Приведенной длиной физического маятника называется длина синхронного с ним математического маятника, т. е. математического маятника, имеющего тот же период колебаний, что и физический маятник.
Приравняв периоды колебаний математического и физического маятников или выражения (111.224) и (111.222), получим

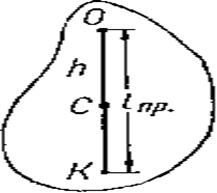
На расстоянии приведенной длины /пр от точки привеса О (рис. 116) находится точка К, которая называется центром колебаний (качаний) физического маятника.
Центр колебаний физического маятника имеет следующие свойства:
1. Центр тяжести маятника расположен между центром колебаний и точкой привеса, следовательно lпр>h.
2. Если заставить маятник колебаться вокруг оси, проходящей через центр колебаний и параллельной его оси привеса, то точка привеса О будет новым центром колебаний такого физического маятника.
Это свойство взаимозаменяемости точки привеса и центра колебаний физического маятника (теорема Гюйгенса) используется в оборотном маятнике Картера, применяемом для определения ускорения силы тяжести в различных точках земной поверхности.
Рассмотрим графический способ нахождения центра колебаний физического маятника, основанный на том, что радиус инерции маятника относительно центральной оси ρc есть средняя пропорциональная между длиной h маятника и расстоянием КС его центра инерции от центра колебаний (рис. 116).
Действительно, согласно
а на основании формулы (111.80)

Следовательно,

Поэтому
Как видно из рис. 116, lпр-h=KC=h1. Поэтому  откуда
откуда

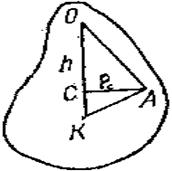
Для нахождения центра колебаний отложим из точки С перпендикулярно к отрезку h отрезок рс (рис. 117) и конец его А соединим с точкой привеса О. Затем под прямым углом к ОА проведем прямую до пересечения с продолжением ОС в искомой точке К — центре колебаний физического маятника. Заметим при этом, что ρc можно отложить как вправо, так и влево от точки С.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 1481; Нарушение авторских прав?; Мы поможем в написании вашей работы!