КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамический анализ
|
|
|
|
Контроль точности определения уравновешивающей.
Cравниваем значения сил, полученные методом планов и методом Н. Е. Жуковского. Определим относительную ошибку:
∆ Рур = [2·|Ржур – Рур| / (Ржур + Рур)]·100 %
∆ Рур = [ ]·100 % =
Основные задачи динамического анализа: определение средней мощности двигателя и определение момента инерции маховика по диаграмме энергомасс.
В общем случае скорости точек ведущего звена механизма, при установившемся движении механизма, являются величинами переменными, т.е. в истинном движении механизма имеет место неравномерность его хода. Маховики используются для регулирования периодических колебаний скорости внутри цикла установившегося движения машины.
Подбором массы и момента инерции маховика можно заставить начальное звено механизма или машины двигаться с заранее заданным отклонением от некоторой его средней скорости.
Исходные данные:
угловая скорость начального звена,  :
:  ;
;
коэффициент неравномерности хода: 
массы звеньев,  :
:  ,
,  ,
, 
длины звеньев,  :
:  ;
;  ;
;
диаметр поршня,  :
:  ;
;
индикаторная диаграмма
Коэффициент неравномерности хода механизма определяется по формуле:
 (1)
(1)
где  ,
,  ,
,  – соответственно максимальная, минимальная и средняя угловые скорости ведущего звена. При этом средняя угловая скорость определяется из уравнения:
– соответственно максимальная, минимальная и средняя угловые скорости ведущего звена. При этом средняя угловая скорость определяется из уравнения:
 (2)
(2)
Решая совместно выражения (1) и (2), получим выражение для определения максимальной и минимальной угловых скоростей ведущего звена:
где  .
.
Т.е необходимо обеспечить колебание угловой скорости ведущего звена в диапазоне:


При исследовании механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменить силами, приложенными к одному из звеньев механизма. Тогда для изучения движения всего механизма достаточно знать закон движения звена приведения. Это условное звено будет своеобразной динамической моделью механизма.
Для построения динамической модели механизма все движущие силы и силы сопротивления, приложенные к нему, заменим приведенным моментом движущих сил и приведенным моментом сил сопротивления, приложенными к начальному звену (звену приведения). Аналогичным образом, массы всех звеньев (точнее говоря их инертности) также приведем к начальному звену и заменим суммарным приведенным моментом инерции  , который будет является, таким образом, эквивалентом всей инертности механизма.
, который будет является, таким образом, эквивалентом всей инертности механизма.
4.1 По заданным значениям  с помощью уравнения мгновенных мощностей для всех положений механизма определим значения приведенных моментов движущих сил и построим диаграмму
с помощью уравнения мгновенных мощностей для всех положений механизма определим значения приведенных моментов движущих сил и построим диаграмму  в функции угла поворота звена приведения (в масштабе -
в функции угла поворота звена приведения (в масштабе -  ).
).
1) Определим с помощью заданной индикаторной диаграммы значения силы сопротивления при каждом положении механизма по формуле
 , Н
, Н
где
–  – давление на поршень, атм. (берется с индикаторной диаграммы для каждого положения поршня).
– давление на поршень, атм. (берется с индикаторной диаграммы для каждого положения поршня).
–  – диаметр поршня, мм.
– диаметр поршня, мм.
Полученные значения заносим в таблицу 4.1.
Таблица 4.1 – Приведённый момент силы сопротивления 
| Положения |

| 
| 
|  , ,
| 
|
2) Определим значение приведенного момента силы полезного сопротивления для каждого положения механизма по формуле

 – значение силы сопротивления в i-ом положении механизма,;
– значение силы сопротивления в i-ом положении механизма,;
 – скорость точки приложения силы полезного сопротивления (точки B);
– скорость точки приложения силы полезного сопротивления (точки B);
Полученные значения заносим в таблицу 4.1:
3) Выбираем масштаб диаграммы приведённого момента сил сопротивления:


Вычисляем для каждого положения ординату диаграммы:

Значения  ординат диаграммы для каждого положения заносим в таблицу 4.1
ординат диаграммы для каждого положения заносим в таблицу 4.1
4) Строим диаграмму приведённого момента сил сопротивления  в выбранном масштабе на листе формата А1.
в выбранном масштабе на листе формата А1.
4.2 С помощью метода графического интегрирования строим диаграмму изменения работ сил полезных сопротивлений –  .
.
Масштаб диаграммы – 
где Н – полюсное расстояние, 

4.3 Строим диаграмму работ движущих сил  в виде прямой линии, соединяющей начало координат с крайней точкой диаграммы , так как за цикл установившегося движения
в виде прямой линии, соединяющей начало координат с крайней точкой диаграммы , так как за цикл установившегося движения  . Линейная зависимость объясняется тем, что у технологических машин момент движущих сил принимают постоянным.
. Линейная зависимость объясняется тем, что у технологических машин момент движущих сил принимают постоянным.
Графическим дифференцированием диаграммы работ движущих сил при полюсном расстоянии Н строим диаграмму приведенного момента движущих сил  .
.
По диаграмме определяем приведенный момент движущих сил:

4.4 Строим диаграмму изменения кинетической энергии за цикл –  , вычитая из ординат диаграммы ординаты диаграммы , т.е
, вычитая из ординат диаграммы ординаты диаграммы , т.е  .
.
Масштаб диаграммы :

Значения изменения кинетической энергии в каждом положении, Дж:
Все необходимые для построения диаграммы значения заносим в таблицу 4.2
Таблица 4.2 – Изменение кинетической энергии
| Положения | 
| 
| 
| 
|
4.5 Вычисляем изменение приведенного момента инерции звеньев механизма для всех его положений. Строим диаграмму 
1) Определим кинетическую энергию механизма в каждом положении
Для звена 1 (кривошип), совершающего вращательное движение:

где  – момент инерции звена относительно оси, проходящей через мгновенный центр вращения О,
– момент инерции звена относительно оси, проходящей через мгновенный центр вращения О,
Для 2 звена (шатун), совершающего плоско-параллельное движение:
где  , – скорость центра масс 2 звена;
, – скорость центра масс 2 звена;
 – момент инерции звена относительно оси, проходящей через центр масс звена,
– момент инерции звена относительно оси, проходящей через центр масс звена,
Для 3 звена, движущегося поступательно:

Кинетическая энергия всего механизма: Т = ∑ Тк, Дж.
2) Вычислим изменение приведенного момент инерции механизма в каждом положений.
Все данные заносим в таблицу 4.3
Таблица 4.3 – Изменение приведённого момент инерции механизма
| 1 звено | 2 звено | 3 звено | механизм | |||||||

| ||||||||||

| ||||||||||
| Поло жение |  , ,
| 
| 
|  , ,
| 
|  , ,
| 
| 
| 
| 
|
3) Строим диаграмму приведённого момента инерции:
Масштаб диаграммы: 
4.6 Исключая графически общий параметр  из диаграмм и
из диаграмм и  строим диаграмму Виттенбауэра
строим диаграмму Виттенбауэра  .
.
4.7 Определяем момент инерции маховика и его размеры.
1) К диаграмме Виттенбауэра сверху и снизу проводим касательные, углы наклона которых соответствуют максимальному и минимальному значениям угловой скорости кривошипа.
Тангенсы углов наклона касательных вычисляем по формулам
 ,
, 
 ,
, 
2) Замеряем отрезок  , отсекаемый касательными линиями на оси
, отсекаемый касательными линиями на оси  , находим момент инерции маховика по формуле
, находим момент инерции маховика по формуле
 .
.


3) Определяем основные размеры и массу маховика.
Маховик конструктивно выполним в виде массивного обода, соединенного со ступицей спицами.
При конструировании маховика в виде обода со спицами случае рекомендуется принимать:

Основные размеры маховика показаны на рисунке 4.1
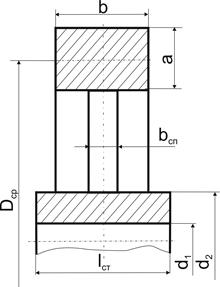
Рисунок 4.1 Эскиз маховика
Введем обозначения:  ,
, 
Основные формулы для расчета размеров маховика.
Средний диаметр маховика вычисляем по формуле:
 – плотность материала: для стали
– плотность материала: для стали  , для чугуна
, для чугуна 
Рекомендуется принимать:  ,
, 
ширина обода маховика:  ,
,
высота обода маховика: 
наружный диаметр маховика: 
масса обода маховика:  .
.
Согласно расчетам по приведенным выше формулам, получим:




Во избежание разрывов обода под действием центробежных сил принимаются следующие предельные значения окружной скорости:
для чугуна -  , для стали -
, для стали -  .
.
Окружную скорость на ободе определяем по формуле:
Масса обода маховика: 
Остальные размеры маховика определим из следующих эмпирических зависимостей:
диаметр отверстия для посадки на вал
 ;
;
диаметр ступицы маховика

длина ступицы

толщина диска, соединяющего обод со ступицей

Вычерчиваем маховик с найденными размерами в выбранном масштабе.
4.8 Исследование установившегося режима работы механизма.
1) Среднюю мощность двигателя определим по формуле:
где  – приведенный момент движущих сил (определен в пункте 4.3);
– приведенный момент движущих сил (определен в пункте 4.3);
 – угловая скорость звена приведения
– угловая скорость звена приведения

2) Построим график изменения угловой скорости вала кривошипа в установившемся движении без маховика и с установленным маховиком.
Изменение угловой скорости ведущего звена определяем по формулам
без маховика:
с маховиком:
где  и
и  – изменение кинетической энергии (таблица 4.2) и приведенного момента инерции (таблица 4.3);
– изменение кинетической энергии (таблица 4.2) и приведенного момента инерции (таблица 4.3);
 – значение приведенного момента инерции в нулевом положении,
– значение приведенного момента инерции в нулевом положении,
 – скорость ведущего звена в начале установившегося движения;
– скорость ведущего звена в начале установившегося движения;
Результаты расчетов заносим в таблицу 4.4
Таблица 4.4 Изменение угловой скорости ведущего звена без учета и с учетом маховика
| Поло жение | 
| 
| 
| 
| 
|
По результатам расчетов строим график (рисунок 4.2).
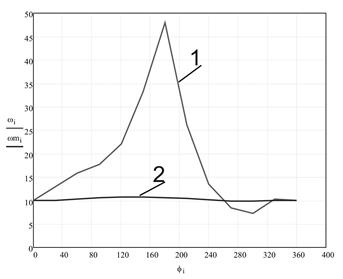
Рисунок 4.2 – Изменение угловой скорости ведущего звена в установившемся режиме: 1 – без маховика, 2 – с маховиком
Определим среднюю скорость установившегося движения: 
и действительный коэффициент неравномерности хода: 
Без маховика:


С установленным маховиком:


Вывод: установка маховика позволяет снизить неравномерность хода ведущего звена машины и обеспечить движение с заранее заданным отклонением от номинальной скорости.
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 622; Нарушение авторских прав?; Мы поможем в написании вашей работы!