КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Бесконтактный двигатель постоянного тока
|
|
|
|
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а)механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
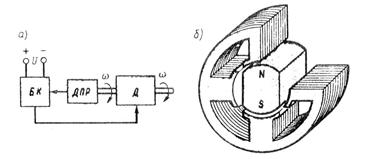
рис. 30.4. Бесконтактный двигатель постоянного тока:
 — блок-схема,
— блок-схема,  — магнитная система
— магнитная система
В качестве датчиков положения ротора применяют чувствительные различные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Хота (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактны-
ми площадками, к которым припаяны выводы /—2, подключенные к источнику напряжения  , и выводы 3 — 4, с которых снимают выходной сигнал
, и выводы 3 — 4, с которых снимают выходной сигнал  . Если в цепи 1 —2 проходит ток
. Если в цепи 1 —2 проходит ток  , а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3 — 4 появляется напряжение . Значение ЭДС зависит от тока и магнитной индукции В, а полярность — от направления тока в цепи 1 — 2 и направления вектора магнитной индукции В.
, а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3 — 4 появляется напряжение . Значение ЭДС зависит от тока и магнитной индукции В, а полярность — от направления тока в цепи 1 — 2 и направления вектора магнитной индукции В.
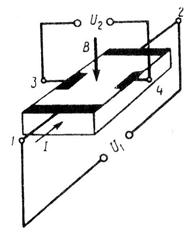
Рис. 30.5. Датчик ЭДС Холла
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VТ1 — VТ4 (рис. 30.6). Четыре обмотки (фазы) двигателя  расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1 — VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1 — 2)осуществляется от источника напряжением .
расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VТ1 — VТ4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1 — 2)осуществляется от источника напряжением .
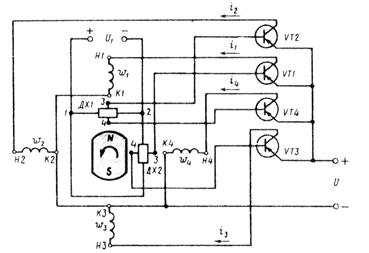
Рис. 30.6. Принципиальная схема БДПТ
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). Если по какой-либо из обмоток (фаз) статора проходит ток от начала Н1 — Н4 к концу К1 — К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
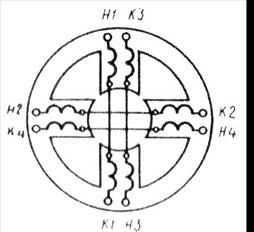
Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VТ2 переходит в открытое состояние. В обмотке (фаза) статора  появляется ток
появляется ток  , протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1 — 3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке
, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1 — 3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VТ3. В фазной катушке  возникает ток
возникает ток  и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2— 4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2 — 4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2 — 4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2 — 4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2— 4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2 — 4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VТ2 закрывается, транзистор VТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2 — 4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2 — 4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VТЗ и VТ4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
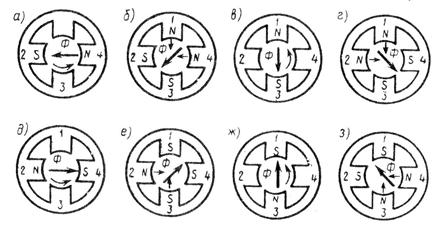
Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.
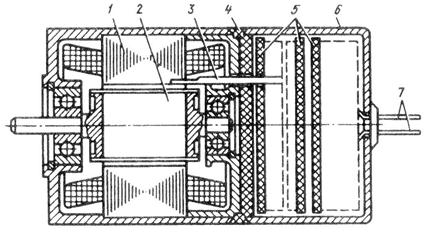
Рис. 30.9. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Таблица 30.1
| Позиция на рис. 30.8 | а | б | в | г | 
| е | ж | 3 | а |
| Открыты транзисторы | VТ2 | VТ2, VТЗ | VТЗ | VТЗ, VТ4 | VТ4 | VТ4, VТ1 | VТ1 | VТ1 VТ2 | VТ2 |
Ток  проходит по фазным катушкам проходит по фазным катушкам
|
| ,
|
| ,

|
|  , ,
|
| ,
|
|
| Угол поворота вектора потока статора, град |
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-коллекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1539; Нарушение авторских прав?; Мы поможем в написании вашей работы!