Механизмы винт – гайка используются для преобразования вращательного движения в поступательное [1, 2]. Для преобразования поступательного движения во вращательное эти механизмы используются редко (механизм перемещения пленки фотоаппарата).
Достоинствами таких механизмов являются высокая точность и плавность поступательного перемещения, простота конструкции и изготовления, компактность, надежность в работе, возможности получения самотормозящей передачи и создания значительных усилий при малых перемещениях. Недостатки механизмов винт – гайка – большие потери на трение в винтовой паре, что обуславливает низкий КПД и повышенный износ.
Механизмы винт – гайка применяют для перемещения магнитных и оптических головок считывания и записи информации в дисководах ПЭВМ; перемещения координатных столов технологического оборудования при изготовлении полупроводниковых и электронных приборов; настройки волноводов; фокусировки окуляров и объективов: перемещения кареток и суппортов станков; измерительных и регулировочных устройств; рабочих органов роботов, испытательных машин и т.д.
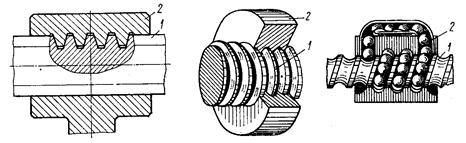
Основными элементами механизмов винт – гайка являются винт 1 и гайка 2 (рис. 16.1, а). Материалы винта и гайки должны обладать низким коэффициентом трения, высокой износостойкостью и хорошо обрабатываться.
в
б
а
Рис. 16.1
Винт представляет собой цилиндр, на части которого нарезана резьба. Изготавливают винты обычно из сталей 45 и 50, а в кинематических передачах– из пластмасс. Гайка представляет собой втулку или корпус с резьбой в отверстии. Для уменьшения трения скольжения (рис. 16.1, б) гайки изготавливают из пластмасс, оловянистых бронз типа БрОЦС 6-6-3, латуни Л60 … 62. С целью уменьшения потерь на трение применяют механизмы винт – гайка с трением качения (рис. 16.1, в). В этой более сложной конструкции резьба заменена винтовыми канавками кругового профиля. Канавки на винте и гайке образуют замкнутую винтовую поверхность, ограничивающую полость, в которую помещаются шарики. Контакт между винтом и гайкой осуществляется посредством шариков. При вращении винта шарики увлекаются в направлении его поступательного движения, попадают в отводной канал в гайке и снова возвращаются в полость между винтом и гайкой.
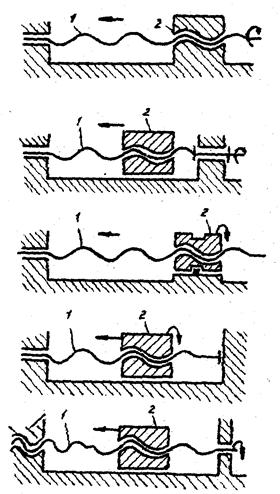
Простейшие винтовые механизмы могут состоять из двух и трех звеньев. Наибольшее распространение получили трехзвенные схемы. Рассмотрим возможные кинематические схемы винтовых механизмов (рис. 16.2):
– двухзвенный механизм (рис. 16.2, а). Винт 1 вращается и одновременно движется поступательно, гайка 2 неподвижна. Механизмы с такой схемой обладают наибольшей точностью получения линейных перемещений при ограниченной величине этих перемещений (до 50 мм). Применяют эту схему в измерительных устройствах (микрометры), механизмах настройки волноводов;
– трехзвенный механизм (рис. 16.2, б). Ведущий винт 1 образует со стойкой вращательную пару и винтовую пару с гайкой 2, которая движется поступательно по неподвижным направляющим. Механизмы с такой схемой обладают меньшей точностью, но значительным линейным перемещением гайки. Используют их для перемещения координатных столов технологического оборудования при изготовлении полупроводниковых приборов и для перемещения магнитных и оптических головок в дисководах ПЭВМ;
ℓ
φ1
φ2
φ2
φ1
φ1
ℓ
ℓ
ℓ
ℓ
д
г
в
б
а
Рис. 16.2
– трехзвенный механизм (рис. 16.2, в). Ведущим звеном является зафиксированная в осевом направлении вращающаяся гайка 2. Ведомое звено – винт 1 образует со стойкой поступательную кинематическую пару. Механизмы с такой кинематической схемой используются для получения сравнительно грубых установочных перемещений (установка на резкость окуляра бинокля);
– двухзвенный механизм (рис. 16.2, г). Гайка 2 вращается и движется поступательно, винт 1 является стойкой, неподвижен. Механизмы с такой кинематической схемой используют в устройствах для получения сравнительно грубых установочных перемещений;
– трехзвенный механизм с двумя разными резьбами на винте (рис. 16.2, д) позволяет получать за один оборот винта 1 относительно малые перемещения ведомой гайки 2. Винт 1 вращается и движется поступательно относительно стойки-гайки 3, гайка 2 перемещается поступательно относительно направляющих. Механизм называется дифференциальным и применяется для получения перемещений, равных разности ходов винта в стойке 3 и гайки 2.
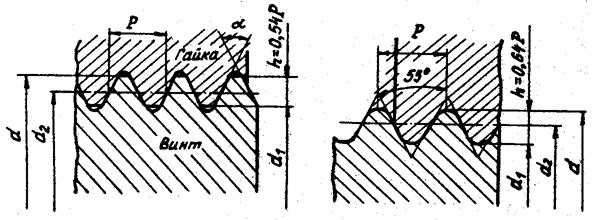
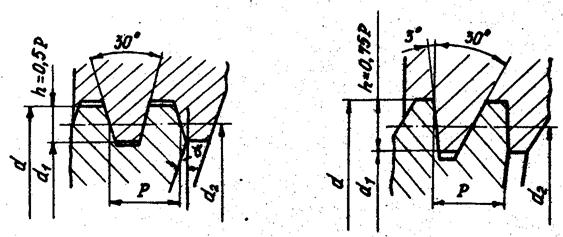
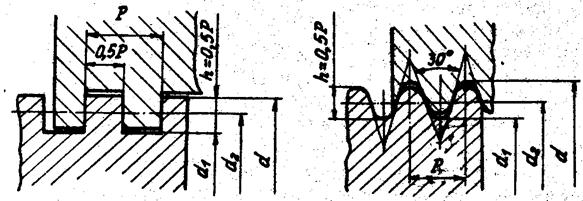
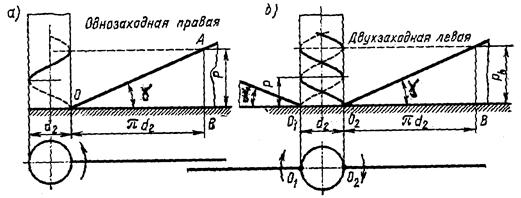
В механизмах винт – гайка с трением скольжения резьба нанесена непосредственно на детали винтовой пары. Характеризуется резьба следующими геометрическими параметрами (рис. 16.3): d – наружный диаметр резьбы; d1 – внутренний диаметр резьбы; d2 – средний диаметр резьбы; р – шаг резьбы–расстояние, измеренное вдоль оси резьбы, между параллельными сторонами соседних витков; рh –ход резьбы, для однозаходной рh = р, а для многозаходной – рh = zр, где z – число заходов; h – рабочая высота профиля; a – угол профиля; g – угол подъема резьбы (рис. 16.4) образован касательной к винтовой линии в точке на среднем диаметре резьбы и плоскостью, перпендикулярной к оси резьбы, и определяется из выражения
tg g = z p/p d2. (16.1)
Геометрические параметры резьб и допуски на их размеры стандартизированы. Резьбы классифицируют по различным признакам:
– по форме поверхности, на которую наносится резьба – на цилиндрическую и коническую. Наиболее распространена цилиндрическая резьба. Коническую резьбу применяют для плотных соединений пробок, труб;
– по форме профиля – на треугольные, трапецеидальные, прямоугольные, круглые и др.;
– по направлению винтовой линии – на правую и левую резьбу. Винты с правой резьбой ввинчивают по часовой и вывинчивают против часовой стрелки. Правое направление имеет абсолютное большинство резьб.
По назначению резьбы делят на крепежные, крепежно-уплотнительные и ходовые. Крепежная резьба должна обладать достаточной прочностью и значительным трением, предохраняющим соединяемые детали от самоотвинчивания. Крепежно-уплотнительные резьбы помимо перечисленных свойств должны обеспечить повышенную плотность соединения. Ходовые резьбы должны быть с малым трением, чтобы уменьшить износ и повысить КПД подвижного резьбового соединения.
Метрическая резьба (см. рис. 16.3, а) получила наибольшее распространение в резьбовых крепежных соединениях. Имеет профиль равностороннего треугольника с углом профиля a = 60°. Вершины и впадины резьбы для уменьшения концентрации напряжений притуплены по прямой или по дуге. Радиальный зазор в резьбе делает ее негерметичной. Метрические резьбы делятся на резьбы с крупным (основным) и мелким шагом. Резьбы с мелким шагом меньше ослабляют деталь, обладают более высокой динамической прочностью и характеризуются из-за малого угла подъема g винтовой линии повышенным самоторможением. Как крепежные, резьбы с мелким шагом применяются в соединениях, подверженных переменным воздействиям и в тонкостенных деталях. Метрическая резьба обеспечивает лучшее направление винта или гайки в винтовых механизмах из-за малого радиального смещения по сравнению с трапецеидальной резьбой. В механизмах винт-гайка с шагами резьбы до 1 мм применяют только метрические резьбы из-за сложности изготовления с такими шагами ходовых резьб трапецеидального и прямоугольного профилей.
Дюймовая резьба используется для крепежных деталей импортного оборудования, вышедших из строя. Она имеет угол профиля a = 55° и плоскосрезанные вершины треугольного профиля. Параметры резьбы дают в дюймах [один дюйм 1² = 25,4 мм]. Применение дюймовых резьб (кроме трубных) для новых изделий запрещается.
в
г
а
б
е
д
Рис. 16.3
б
а
Рис. 16.4
Трубная резьба представляет собой мелкую дюймовую резьбу, она обеспечивает беззазорность и плотность резьбового соединения за счет скругления вершин и впадин резьбы (см. рис. 16.3, б). За номинальный диаметр трубной резьбы принимают внутренний диаметр трубы, а наружный диаметр трубной резьбы больше номинального на величину удвоенной толщины стенки трубы. Например, резьба труб ½ ² используется для труб с внутренним диаметром ½ ², наружный диаметр ее равен 20,96 мм. Используется трубная резьба в трубопроводах и для тонкостенных деталей.
Трапецеидальная резьба (см. рис. 16.3, в) – основная резьба в механизмах винт-гайка. Ее профиль – равнобокая трапеция с углом a = 30°. Резьба имеет меньшие по сравнению с резьбой треугольного профиля потери на трение, больший КПД, обеспечивает высокую точность осевого перемещения ведомого звена. Широко применяется для реверсивных передач винт-гайка.
Упорная резьба (см. рис. 16.3, г) имеет профиль неравнобокой трапеции с углом a = 30°. Рабочая сторона профиля имеет угол наклона 3°, КПД этой резьбы выше, чем КПД трапецеидальной резьбы. Рекомендуется применять эту резьбу в механизмах винт-гайка при значительных односторонних осевых нагрузках.
Прямоугольная резьба (см. рис. 16.3, д) с профилем в форме квадрата имеет самый высокий КПД, так как угол профиля резьбы a = 0. Резьба обладает пониженной прочностью. При износе образуются осевые зазоры, которые трудно устранить. Резьба применяется в малонагруженных передачах винт-гайка (перемещение головок записи и считывания информации в дисководах).
Круглая резьба (см. рис. 16.3, е) имеет угол профиля a = 30°. Профиль резьбы состоит из дуг, сопряженных короткими прямыми линиями. Резьба не стандартизирована. Характеризуется высокой динамической прочностью, имеет ограниченное применение.
В механизмах винт-гайка применяют трапецеидальные, метрические, прямоугольные и упорные резьбы. Наибольшее применение получили трапецеидальные и метрические резьбы. Трапецеидальную резьбу рекомендуют применять с шагом р > 1 мм, метрическую в механизмах с мелкими шагами (р £ 1,0).
КПД винтовых механизмов рассчитывают по формуле
h = tgg / tg(g + rт), (16.2)
где g – угол подъема винтовой линии; rт – приведенный угол трения.
Для резьбы приведенный угол трения
rт = arctg f¢ = arctg[f / cos(a/2)], (16.3)
где f¢ – приведенный коэффициент трения скольжения; f – коэффициент трения скольжения между материалами винта и гайки; a – угол профиля резьбы.
Для прямоугольной резьбы a = 0 и f¢ = f, для трапецеидальной резьбы a = 30° и f¢ = 1,04 f; для метрической резьбы a = 60° и f¢ = 1,15 f.
Наибольшим КПД обладает прямоугольная, а наименьшим – метрическая резьба.
В технических системах более всего распространены винтовые механизмы, выполненные по схеме, представленной на рис. 16.1, б. Зависимость линейного перемещения ℓ2 ведомой гайки от угла поворота j1 винта (функция положения) имеет вид
, (16.4)
где – передаточная функция, или аналог скорости передачи винт-гайка.
Линейная скорость ведомой гайки
v2 = dl2 / dt = , (16.5)
где w1 = dj1/dt – угловая скорость винта.
Для снижения скорости линейного перемещения гайки при заданной угловой скорости винта w1 уменьшают шаг резьбы р и число ее заходов z принимают равным 1. Скорость перемещения гайки v2 можно уменьшить за счет снижения угловой скорости винта w1 с помощью червячной или многоступенчатой зубчатой передачи (редуктора). Эти редукторы устанавливают между двигателем и передачей винт – гайка. Тогда w1 = wд / iд1, где iд1 – передаточное отношение зубчатого редуктора, wд – скорость вращения двигателя.
Механизм с дифференциальным винтом (рис. 16.2, д) имеет две винтовые пары с разными параметрами резьбы. В паре со стойкой 3 винт имеет резьбу с шагом р1 и числом заходов z1, а в винтовой паре с ведомой гайкой 2 – резьбу с шагом р2 и числом заходов z2. Аналог скорости поступательного перемещения в соответствующих винтовых парах будет соответственно равен и . Функция положения, т.е. зависимость линейного перемещения гайки 2 от угла поворота винта, равна
, (16.6)
где знак минус относится к механизмам с винтом, имеющим резьбы одного направления винтовой линии, а знак плюс – к механизмам с винтом, имеющим резьбы в парах со стойкой 3 и гайкой 2 с разным направлением винтовой линии, например, правую и левую резьбы.
Длина нарезанной части винта Lb определяется по формуле
Lb=ℓmax+ℓr+Dℓ, (16.7)
где ℓmax – максимальное перемещение винта или гайки; ℓr – длина резьбы гайки; Dℓ – запас резьбы (2 … 3 витка).
Для обеспечения достаточной прочности и жесткости диаметр винта d выбирают из соотношения d ³ 0,05 Lb.
studopediasu.com - Студопедия (2013 - 2026) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление

 , (16.4)
, (16.4) – передаточная функция, или аналог скорости передачи винт-гайка.
– передаточная функция, или аналог скорости передачи винт-гайка. , (16.5)
, (16.5) и
и  . Функция положения, т.е. зависимость линейного перемещения гайки 2 от угла поворота винта, равна
. Функция положения, т.е. зависимость линейного перемещения гайки 2 от угла поворота винта, равна , (16.6)
, (16.6)