КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Энергетическая диаграмма, электромагнитный момент, механическая характеристика асинхронного двигателя
|
|
|
|
Энергетическая диаграмма.
Мощность, поступающая на статор из сети:
P1 = P эс + Рст + Рэр +Рмех + РД + Р2
Р2 — полезная механическая мощность на валу. Все другие представляют потери в двигателе. Рэс — мощность электрических потерь в статоре; Рст — мощность потерь в стали магнитопровода; Рэр — электрические потери в роторе; Р мэх —механические потери на трение; РД —добавочные потери.
Это соотношение иллюстрируется энергетической диаграммой (на рисунке). На ней в виде потока, перемещающегося направо, изображена мощность Р 1 ; в виде небольших отходящих рукавов показаны мощности потерь в двигателе; на выходе справа — полезная мощность на валу Р2 .
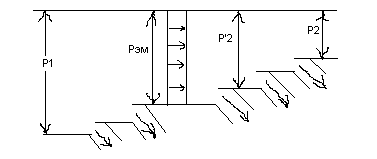
Р’2—механическая мощность ротора; Рэм — электромагнитная мощность двигателя.
Механическая характеристика. При оценке двигателей важна зависимость скорости вращения от вращающего момента, которая называется механической характеристикой. Различают 3 вида: 1) абсолютно жесткая, если скорость не зависит от момента на валу(прямая 1); 2) жесткая если скорость изменяется незначительно (прямая 2); 3) мягкая если есть значительные изменения скорости вращения (прямые 3,4).
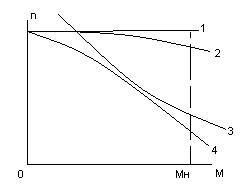
У асинхронного двигателя скольжение и скорость вращения изменяются незначительно. Он обладает жесткой механической характеристикой.
38.Способы регулирования частоты вращения АД с ф.р.
 Регулирование изменением скольжения выполняют изменением сопротивления Rp регулировочного реостата в цепи ротора.
Регулирование изменением скольжения выполняют изменением сопротивления Rp регулировочного реостата в цепи ротора.
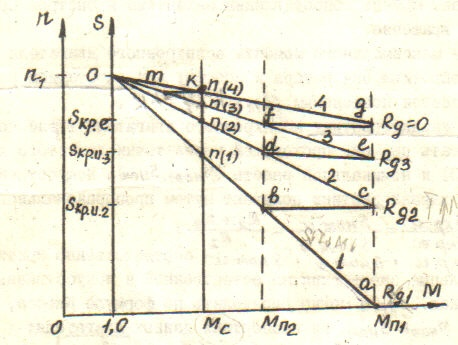
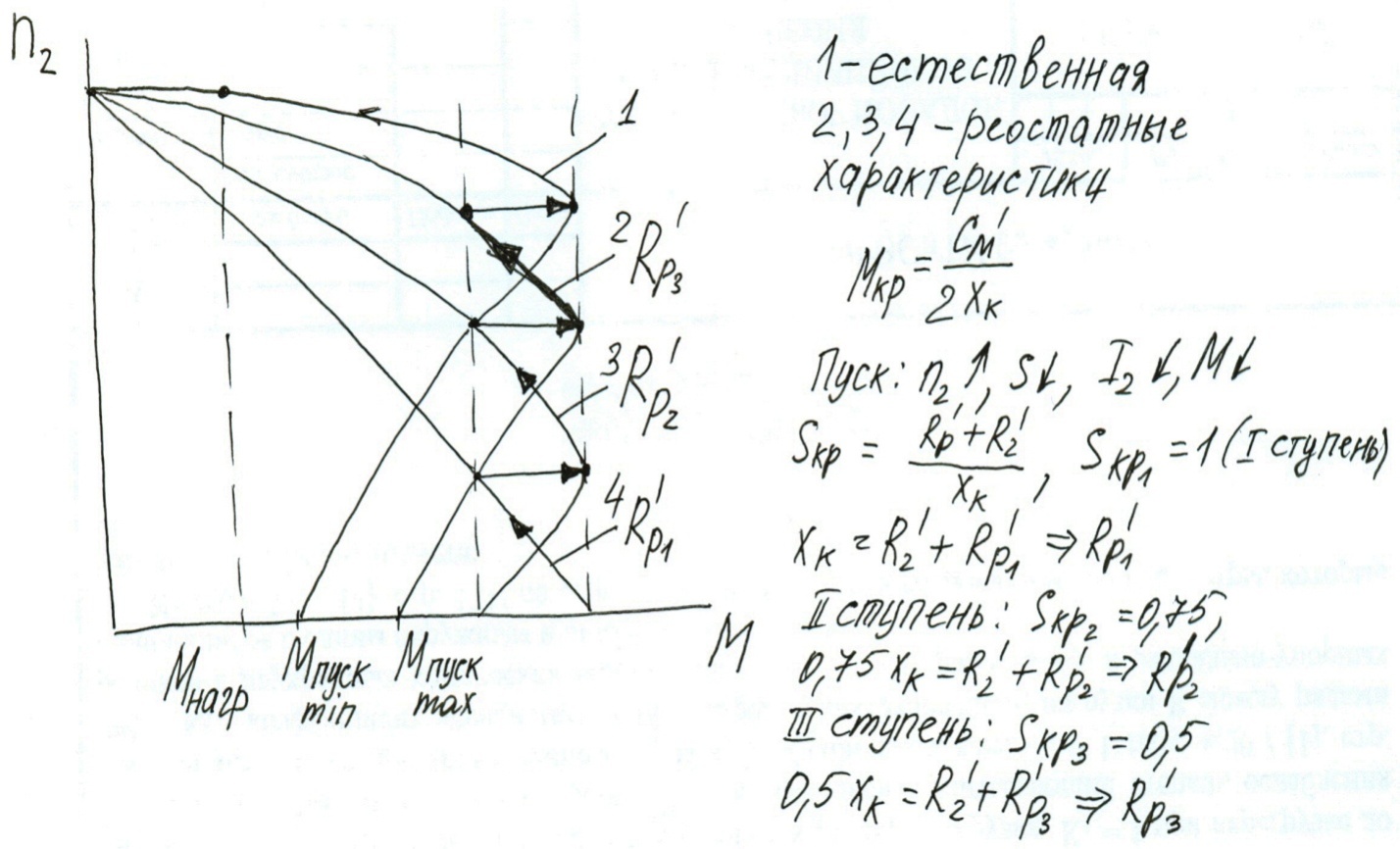
Введение реостата в цепь ротора изменяет зависимость вращающего момента М от скольжения s, не влияя на величину наибольшего момента. Три характеристики M(s): естественная (безреостатная) характеристика 1 соответствует замкнутой накоротко обмотке ротора (сопротивление реостата = 0), реостатные (искусственные) характеристики 2 и 3 – введенным одной и двум ступеням реостата.
Введение реостата в цепь ротора положительно влияет на пусковой ток, снижая его примерно в 2 раза по сравнению с короткозамкнутым АД.
Недостатки данного способа: 1) низкая экономичность из-за потерь в реостате Rp; 2) снижение жесткости механических характеристик; 3) частоту вращения можно регулировать только в сторону понижения.
39 Пуск асинхронного двигателя с фазным ротором. 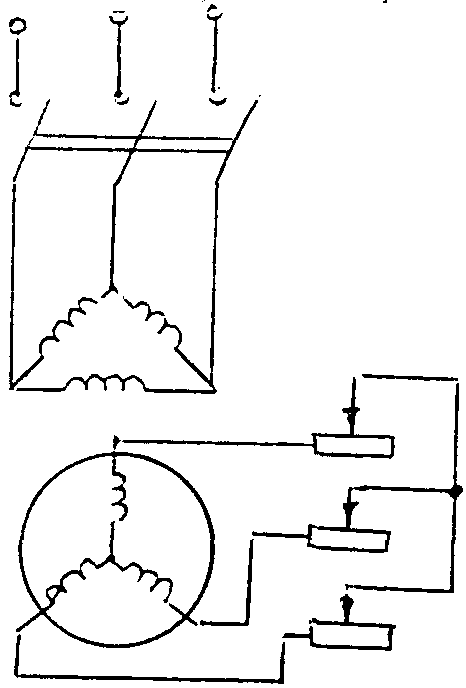 Пуск в ход асинхронных двигателей существенно отличается от условий нормальной работы. Момент двигателя при пуске должен превышать момент сопротивления нагрузки, роль играет пусковой момент. Второй важной пусковой характеристикой является пусковой ток. Кратность пускового тока для двигателей с короткозамкнутым ротором достигает 5-7, что может быть недопустимо для двигателя или для сети и может иметь значение плавность пуска. Пуск в ход двигателя с фазным ротором осуществляется через 3х фазный реостат, каждая фаза которого включена через щётки и кольца в одну из фаз ротора. В начале пуска реостат введён полностью, к концу пуска он выводится и все три фазы ротора замыкаются накоротко. Число ступеней реостата берётся больше двух и процесс переключений при пуске обычно автоматизируется. Введение активных сопротивлений в цепь фазного ротора увеличивает момент и делает пуск плавным и ограничивает пусковой ток. Этот способ пуска имеет ряд достоинств, но применим только для двигателей с фазным ротором.
Пуск в ход асинхронных двигателей существенно отличается от условий нормальной работы. Момент двигателя при пуске должен превышать момент сопротивления нагрузки, роль играет пусковой момент. Второй важной пусковой характеристикой является пусковой ток. Кратность пускового тока для двигателей с короткозамкнутым ротором достигает 5-7, что может быть недопустимо для двигателя или для сети и может иметь значение плавность пуска. Пуск в ход двигателя с фазным ротором осуществляется через 3х фазный реостат, каждая фаза которого включена через щётки и кольца в одну из фаз ротора. В начале пуска реостат введён полностью, к концу пуска он выводится и все три фазы ротора замыкаются накоротко. Число ступеней реостата берётся больше двух и процесс переключений при пуске обычно автоматизируется. Введение активных сопротивлений в цепь фазного ротора увеличивает момент и делает пуск плавным и ограничивает пусковой ток. Этот способ пуска имеет ряд достоинств, но применим только для двигателей с фазным ротором.
|
|
|
|
|
Дата добавления: 2014-11-28; Просмотров: 805; Нарушение авторских прав?; Мы поможем в написании вашей работы!