КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Додавання багатьох паралельних сил. Центр системи паралельних сил
|
|
|
|
План
План
План
План
1. Механіка і її місце серед інших наук.
2. Основні історичні етапи розвитку механіки.
3. Механіка машин та її основні завдання.
4. Класифікація механізмів та машин.
1. Механіка і її місце серед інших наук
Механікою називається наука про найпростіші форми руху матеріальних тіл, які зводяться до простих переміщень, тобто переходів тіл з одного положення в просторі та часі в інше.
Спочатку розглянемо деякі поняття, що лежать в основі механіки. Це насамперед поняття про матеріальну точку, систему матеріальних точок та абсолютне тверде тіло.
Основні поняття механіки сформувалися в результаті численних дослідів та спостережень над явищами природи.
Матеріальною точкою будемо називати тіло, розмірами якого можна знехтувати при розв’язанні певних задач механіки. Нехтуючи розмірами, ми не нехтуємо цілком його матеріальними властивостями.
Системою називається така сукупність матеріальних точок, рухи і положення яких взаємопов’язані між собою.
Абсолютно твердим тілом називається тіло, відстані між будь-якими двома точками якого не змінюються під час його руху.
Надалі ми розглядатимемо майже виключно рухи абсолютно твердих тіл, якщо не буде зроблено окремого застереження. Для скорочення висловів абсолютно тверді тіла називатимемо просто твердими.
Курс технічної механіки вивчає рухи матеріальних точок, їх дискретних систем та твердих тіл, а також основи розрахунків і конструювання деталей та вузлів механізмів та машин. Положення, встановлені в механіці, як й інші закони природознавства, об’єктивно відбивають реально існуючу дійсність.
Почасти у зв’язку з історичними традиціями, почасти з методичних міркувань технічну механіку поділяють на чотири основні частини: статику, кінематику, динаміку та розрахунок вузлів та деталей машин. Зміст цих частин будемо розглядати нижче.
Основні поняття механіки розвивались у нерозривному зв’язку з практичними потребами, що виникали у процесі історичного і економічного розвитку людства.
У ранній період розвитку механіки провідні проблеми виникали, зокрема, у зв’язку із запитами мореплавства, для потреб якого треба було мати достатньо точні таблиці, які допомагали визначати положення на небі яскравих зірок, планет і місяця протягом року. У той час головну роль відігравали проблеми небесної механіки. Тепер провідна роль належить проблемам техніки.
Протягом майже всієї історії розвитку механіки можна простежити взаємний зв’язок між проблемами теоретичної механіки і проблемами техніки. Теоретична механіка черпає проблеми, що потребують дослідження, з конкретних питань будівельної механіки, теорії розрахунку і конструювання тощо. Звичайно, і рівень розвитку механіки впливає на розвиток галузей техніки. Цим пояснюється важливість механіки як науки.
2. Основні історичні етапи розвитку механіки
Перші справді наукові результати в галузі механіки ми знаходимо в працях Архімеда (287 – 212 рр. до н. е.). Йому належить один із основних законів гідростатики і теорія важеля. Він дав пояснення принципу дії коловороту, клина та винайшов гвинт, на базі якого створив гвинтовий насос для підняття води.
Ми не будемо докладно розглядати історію розвитку механіки, зробимо лише декілька загальних зауважень про найвидатніших учених, яким ми зобов’язані низкою фундаментальних праць, що привели до сформування сучасної класичної механіки.
Найперше слід згадати М.Коперника (1473–1543) та Й. Кеплера (1571–1630). М. Коперник у загальних рисах окреслив геліоцентричну теорію руху планет навколо Сонця, а Й. Кеплер підтвердив цю теорію відомими трьома законами. Ці закони дали змогу І. Ньютону обґрунтувати закон всесвітнього тяжіння.
Особливо важливі дослідження провів Г. Галілей (1564–1642). Йому належить відкриття першого основного закону механіки – закону інерції. Галілей заклав основи сучасної кінематики, йому належать праці із статики.
Нарешті, відзначимо І. Ньютона (1643–1727). Ньютон об’єднав, узагальнив і обґрунтував тодішні досягнення механіки в своїй визначній праці “Математичні начала натуральної філософії”(1689). У цій книзі висловлені основні положення класичної механіки. Величезним досягненням Ньютона було встановлення закону всесвітнього тяжіння.
Розглянемо основні етапи розвитку механіки у 18 і 19 століттях.
Серед видатних учених 18 ст. слід відзначити Бернуллі (1667–1748), Ж.д’Аламбера (1717–1783), членів Петербурзької академії наук – М.В. Ломоносова (1711–1765), Л. Ейлера (1707–1783), Ж. Лагранжа (1736–1813). З іменами цих учених ми будемо зустрічатись протягом вивчення механіки.
М.В. Ломоносов підняв принципові питання про природу сил тяжіння, про збіг інертної маси тіла з ваговою масою, Л.Ейлеру належать глибинні дослідження з динаміки, зокрема, динаміки твердого тіла, Ж. Лагранжу – визначна праця “Аналітична механіка” (1788).
Особливо бурхливого розвитку теоретична механіка набула в 19ст. Тут ми відзначимо праці У. Гамільтона (1805–1865), К. Якобі (1804–1851), Ф. Гаусса (1777–1855). Дослідження цих учених сприяли розвиткові аналітичних методів механіки.
Із російських вчених у першу чергу відзначимо академіка М.В. Остроградського (1801–1862), який провів глибокі дослідження в галузі аналітичної механіки. Величезний вклад у розвиток механіки зробив М.Є. Жуковський (1847–1921). Загальновідомі праці М.Є. Жуковського з аеродинаміки.
Найбільше праць російських учених у галузі теоретичної механіки стосується питань динаміки твердого тіла. Блискучий початок досліджень у цій частині механіки поклала С.В. Ковалевська (1850–1891).
Найстародавніша праця про механізми і машини, яку ми маємо, – це “Механічні проблеми” Аристотеля (384–322р. до н.е.), в якій описані важіль, криничний журавель, кривошип, колесо, гончарний верстат, центрифуги, зубчаті колеса тощо.
Велика роль у створенні машин відводиться грецькому вченому Ктесибію (300–230 до н.е.), який винайшов пожежний насос, створив ряд гідравлічних та пневматичних механізмів.
Великими ученими епохи Відродження був Леонардо да Вінчі (1452–1519). Він вперше визначив експериментально коефіцієнт тертя ковзання, створив багато нових механізмів, різні конструкції ткацьких верстатів, друкарських деревообробних машин, волочильний верстат, розробив декілька проектів вантажопіднімальних машин.
Наукові відкриття М.В. Ломоносова та Л. Ейлера надихнули російських винахідників: І.І. Ползунова (1728–1766) – на розробку двоциліндрового парового двигуна, пристроїв для подачі води та пари; І.П. Кулібіна (1735–1818) – на створення протезу, годинника-автомата, “самокатки”, конструкція якої містила всі риси майбутніх автомобілів; К.Д. Фролова (1726–1800) – на створення комплексу рудо- і водопіднімальних пристроїв; батька і сина Черепанових – на створення і запуск першої в Росії залізниці на паровій тязі; А.К. Нартова (1693–1756) на побудову токарно-гвинторізного верстата.
Видатному основоположнику російської школи теорії механізмів і машин П.Л. Чебишову (1821–1894) належить низка досліджень, присвячених синтезу механізмів, теорії регуляторів і зубчатого зачеплення, структурі плоских механізмів. Він створив понад 40 оригінальних механізмів.
Велику роль у розвитку теорії механізмів відіграли праці Л.В. Ассура (1878–1920), який створив найраціональнішу класифікацію плоских механізмів.
Основоположником радянської школи теорії механізмів та машин був І.І. Артоболевський (1905–1977), перу якого належать праці з структури, кінематики та синтезу механізмів, динаміки машин і теорії машин-автоматів, а також низка підручників, навчальних посібників, довідників, визнаних і перекладених на багато мов світу.
3. Механіка машин та її основні завдання
Механіка механізмів і машин вивчає методи побудови та дослідження механізмів та машин і складається з основних частин:
1. Структурний аналіз та класифікація механізмів.
2. Кінематичний аналіз механізмів.
3. Динаміка механізмів.
Перед механікою машин стоять два основні завдання:
1. Аналіз механізмів. Це завдання полягає в тому, щоб вивчити методи дослідження існуючих механізмів. Так наприклад, кінематичний аналіз передбачає визначення траєкторій, швидкостей та прискорень різноманітних точок механізмів.
2. Синтез механізмів. Це завдання обернене аналізу і полягає в проектуванні механізмів за відомими структурними, кінематичними або динамічними умовами.
4. Класифікація механізмів та машин
Механізмом називається система твердих тіл, з’єднаних між собою кінематичними парами, призначена для перетворення одного руху в інший.
Призначення механізмів – передавати або змінювати рух.
Механізми можуть бути:
а) гідравлічними;
б) пневматичними;
в) електричними тощо.
З точки зору функціонального призначення механізми машин поділяються на такі:
а) механізми двигунів та перетворювачів (генераторів);
б) передавальні (приводи);
в) виконавчі;
г) механізми керування, контролю і регулювання;
д) механізми подачі й транспортування;
е).механізми автоматичного підрахунку, зважування та упаковки готової продукції.
Перші три різновиди механізмів відносяться до основних, решта – допоміжні.
Механізми двигунів і перетворювачів (генераторів) призначені для перетворення різних видів енергії в механічну роботу і навпаки.
Передавальні механізми (приводи) передають рух від двигуна до виконавчих органів машини.
Виконавчі механізми – це механізми, які безпосередньо діють на оброблюване середовище.
Машиною називається система механізмів, призначена для виконання корисної роботи або перетворення одного виду енергії в інший.
З точки зору функцій, які виконують машини, їх можна поділити на такі класи (рис.1):
а) енергетичні машини;
б) робочі машини;
в) інформаційні машини;
г) кібернетичні машини.
1.. Енергетичною називається машина, призначена для перетворення будь-якої енергії в механічну і навпаки. У першому випадку вона носить назву двигуна, а в другому – генератора.
2. Робочою називається машина, призначена для перетворення матеріалів.
Робочі машини поділяються на транспортні та технологічні.
Транспортною називається робоча машина, в якій перетворення матеріалів полягає тільки у зміні положення основного об’єкту, який переміщається. До них належать автомобілі, трактори, транспортери, ліфти, локомотиви тощо.

Технологічною називається робоча машина, в якій перетворення матеріалів полягає у зміні форми, властивостей і стану матеріалу або оброблюваного об’єкту. Це верстати, текстильні, металургійні машини тощо.
3.. Інформаційною називається машина, призначена для перетворення інформації.
Інформаційні машини поділяються на: контрольно-керувальні та математичні.
Контрольно-керувальною називається машина, яка перетворює отриману контрольно-вимірювальну інформацію з метою керування енергетичною або робочою машинами.
Математичною називається машина, яка перетворює інформацію, отриману у вигляді різноманітних математичних образів, які задаються у формі окремих чисел або алгоритмів (обчислювальні машини).
4. Кібернетичною називається машина, яка заміняє або імітує різноманітні механічні, фізіологічні або біологічні процеси людини та живої природи і наділена елементами штучного інтелекту. Наприклад, машини, що відновлюють людську мову за заданими акустичними спектрами; машини, що заміняють окремі органи людини (серце, нирки, кінцівки тощо).
Якщо процеси перетворення енергії, матеріалів та інформації відбуваються без безпосереднього втручання людини, то такі машини називаються машинами-автоматами. Але ці машини потребують присутності людини – оператора, тобто такої людини, що слідкує за її роботою.
Сукупність машин-автоматів, з’єднаних між собою і призначених для виконання певного технологічного процесу, називається автоматичною лінією.
Питання для самоконтролю
1.Що вивчає механіка?
2.Дати означення матеріальній точці, системі матеріальних точок, абсолютно твердому тілу.
3.Основні завдання курсу технічної механіки.
4.Теоретична механіка та її місце серед інших наук.
5.Історія розвитку механіки як науки.
6.Що вивчає теорія механізмів та машин, з яких основних частин вона складається?
7. Дати означення механізму. Їх різновиди.
8. Що називається машиною? Як вони класифікуються?
МОДУЛЬ “СТАТИКА”
СТАТИКА АБСОЛЮТНО ТВЕРДОГО ТІЛА
Лекція №2
Тема: “Основні поняття та аксіоми статики”
1. Завдання статики та основні її поняття.
2. Аксіоми статики.
3. В’язі та їх реакції. Приклади в’язей.
1. Завдання статики та основні її поняття
Статикою називається розділ теоретичної механіки, в якому з’ясовуються властивості систем сил і умови рівноваги твердих тіл, що перебувають під дією сил.
Силою називається фізична величина, яка є основною мірою механічної взаємодії матеріальних тіл.
Всі величини в механіці можна поділити на скалярні, тобто такі, які повністю характеризуються їх чисельним значенням, та векторні, тобто такі, які, крім чисельного значення, характеризуються і напрямом у просторі.
Сила – величина векторна. Кожну силу можна характеризувати її величиною або модулем, напрямом у просторі й точкою прикладання.
 Основною одиницею вимірювання сили в Міжнародній системі одиниць (СІ), якою ми будемо користуватись, є 1 ньютон (1 Н), використовується і більш крупна одиниця 1 кілоньютон (1 кН =1000 Н). Для статичного вимірювання сили служать відомі нам із фізики прилади – динамометри.
Основною одиницею вимірювання сили в Міжнародній системі одиниць (СІ), якою ми будемо користуватись, є 1 ньютон (1 Н), використовується і більш крупна одиниця 1 кілоньютон (1 кН =1000 Н). Для статичного вимірювання сили служать відомі нам із фізики прилади – динамометри.
Силу, як і всі інші векторні величини, будемо позначати літерою з рискою над нею (наприклад,  ), а модуль сили – символом
), а модуль сили – символом  або тією ж літерою, але без риски над нею – F. Графічно сила, як й інші вектори, зображається напрямленим відрізком (рис.1). Довжина цього відрізка виражає в обраному масштабі модуль сили, напрямок відрізка відповідає напряму сили, а точка А на рис.1 є точкою прикладання сили. Пряма DE, уздовж якої напрямлена сила, називається лінією дії сили.
або тією ж літерою, але без риски над нею – F. Графічно сила, як й інші вектори, зображається напрямленим відрізком (рис.1). Довжина цього відрізка виражає в обраному масштабі модуль сили, напрямок відрізка відповідає напряму сили, а точка А на рис.1 є точкою прикладання сили. Пряма DE, уздовж якої напрямлена сила, називається лінією дії сили.
Умовимось про деякі означення, якими нам доведеться користуватись у подальшому викладі.
1. Системою сил будемо називати сукупність сил, які діють на тіло. Якщо лінії дії всіх сил лежать в одній площині, система сил називається плоскою, а якщо лінії дії не лежать в одній площині, – просторовою. Сили, лінії дії яких перетинаються в одній точці, називаються збіжними, а сили, лінії дії яких паралельні одна одній, – паралельними.
2. Тіло, якому із даного положення можна надати будь-яке переміщення в просторі, називається вільним.
3. Якщо одну систему сил, що діє на вільне тверде тіло, можна замінити іншою системою, не змінюючи при цьому стану спокою чи руху, в якому перебуває тіло, то такі дві системи сил називаються еквівалентними.
4. Система сил, під дією якої вільне тверде тіло може перебувати у спокої, називається зрівноваженою або еквівалентною нулю.
5. Сила, еквівалентна системі сил, називається рівнодійною системи сил. Сила, що зрівноважує систему сил, називається зрівноважуючою. Зрівноважуюча сила дорівнює за модулем рівнодійній, протилежна їй за напрямком й діє вздовж тієї ж прямої.
6. Сили розрізняють зовнішні й внутрішні стосовно системи. Зовнішніми називаються сили взаємодії між точками системи і тілами, що не належать до неї. Внутрішніми називаються сили взаємодії між точками даної системи.
7. Сила, прикладена до тіла в якійсь одній його точці, називається зосередженою. Сили, що діють на всі точки даного об’єму або даної частини поверхні тіла, називаються розподіленими.
Поняття про зосереджену силу є умовним, оскільки практично прикласти силу до однієї точки неможливо. Сили, які в механіці розглядають як зосереджені, по суті є рівнодійними деяких систем розподілених сил. Так, сила ваги, що діє на дане тверде тіло, є рівнодійною сил ваги, що діють на його частини. Лінія дії цієї рівнодійної проходить через точку, яку називають центром ваги тіла.
У завдання статики входить:
1. Перетворення систем сил, прикладених до абсолютно твердих тіл, у системи їм еквівалентні, зокрема, зведення даної системи сил до найпростішого вигляду.
2. З’ясування умов рівноваги систем сил, прикладених до твердого тіла.
Вирішити ці завдання можна за допомогою графічних методів (геометричних побудов) або шляхом чисельних розрахунків, тобто аналітичного методу. Ми здебільшого будемо користуватись останнім.
2. Аксіоми статики
 Перша аксіома. Якщо на вільне абсолютно тверде тіло діють дві сили, то тіло може перебувати у рівновазі тоді й тільки тоді, коли вони однакові за модулем ( F1=F2 ) і діють уздовж спільної лінії дії в протилежних напрямах (рис.2).
Перша аксіома. Якщо на вільне абсолютно тверде тіло діють дві сили, то тіло може перебувати у рівновазі тоді й тільки тоді, коли вони однакові за модулем ( F1=F2 ) і діють уздовж спільної лінії дії в протилежних напрямах (рис.2).
Друга аксіома. Дія даної системи сил на тверде тіло не порушиться, якщо до неї додати або від неї відняти зрівноважену систему сил. Іншими словами, дві системи сил, що відрізняються на зрівноважену систему, еквівалентні одна одній.
Друга аксіома статики має два висновки.
Висновок 1. Дія сили на абсолютно тверде тіло не зміниться, якщо перенести точку її прикладання вздовж її лінії дії в будь-яку іншу точку тіла.
 Доведення. Нехай на тверде тіло діє сила , прикладена в точці А (рис.3). Візьмемо на лінії дії цієї сили довільну точку В і прикладемо в ній дві сили, що дорівнюють за чисельною величиною силі і напрямлені у прямо протилежні боки вздовж її лінії дії, тобто
Доведення. Нехай на тверде тіло діє сила , прикладена в точці А (рис.3). Візьмемо на лінії дії цієї сили довільну точку В і прикладемо в ній дві сили, що дорівнюють за чисельною величиною силі і напрямлені у прямо протилежні боки вздовж її лінії дії, тобто  і
і  . Від цього дія сили на тіло не зміниться. Але ж сили і
. Від цього дія сили на тіло не зміниться. Але ж сили і  також утворюють зрівноважену систему, яка може бути відкинута. (Відкинуті або перенесені сили ми будемо на рисунках перекреслювати). У результаті на тіло буде діяти тільки одна сила
також утворюють зрівноважену систему, яка може бути відкинута. (Відкинуті або перенесені сили ми будемо на рисунках перекреслювати). У результаті на тіло буде діяти тільки одна сила  , прикладена в точці В. Висновок доведено.
, прикладена в точці В. Висновок доведено.
Таким чином, вектор сили можна вважати прикладеним у будь-якій точці на її лінії дії (такий вектор називається ковзним).
Звичайно, цей результат матиме реальний фізичний зміст лише тоді, коли точка В належить абсолютно твердому тілу, до якого прикладено в точці А силу .
Висновок 2. Рівнодійна і зрівноважуюча сили однакові за модулем і напрямлені вздовж однієї прямої в протилежні боки.
 |
Доведення. Допустимо, що сила
 – рівнодійна системи сил, ,...,
– рівнодійна системи сил, ,...,  (рис.4). На підставі аксіоми 1 для сили , а отже, і для системи сил , ,..., зрівноважуючою буде сила
(рис.4). На підставі аксіоми 1 для сили , а отже, і для системи сил , ,..., зрівноважуючою буде сила  , що дорівнює за модулем силі і напрямлена уздовж однієї з нею прямої в протилежний бік.
, що дорівнює за модулем силі і напрямлена уздовж однієї з нею прямої в протилежний бік.
Третя аксіома (закон паралелограма). Дві сили, прикладені до твердого тіла в одній точці, мають рівнодійну, яка прикладена в тій же точці й зображається діагоналлю паралелограма, побудованого на цих силах як на сторонах.
Вектор , який дорівнює діагоналі паралелограма, побудованого на векторах і (рис.5), називається геометричною сумою векторів і , тобто  .
.
Закон паралелограма сил можна ще сформулювати так: дві сили, прикладені до тіла в одній точці, мають рівнодійну, яка дорівнює геометричній (векторній) сумі цих сил і прикладена в тій же точці.
Четверта аксіома (закон рівності дії та протидії). При будь-якій дії одного матеріального тіла на інше має місце така ж чисельно, але протилежна за напрямком протидія.
 Цей закон є одним із основних законів механіки. Із нього випливає, що якщо тіло А діє на тіло В з деякою силою , то одночасно тіло В діє на тіло А з такою ж за модулем, напрямленою уздовж тієї ж прямої, але в протилежний бік силою
Цей закон є одним із основних законів механіки. Із нього випливає, що якщо тіло А діє на тіло В з деякою силою , то одночасно тіло В діє на тіло А з такою ж за модулем, напрямленою уздовж тієї ж прямої, але в протилежний бік силою  (
( ) (рис.6).
) (рис.6).
Відзначимо, що сили і , як такі, що прикладені до різних тіл, не утворюють зрівноважену систему сил.
П’ята аксіома (принцип твердіння). Рівновага тіла, що деформується і перебуває під дією системи сил, не порушиться, якщо тіло вважати затверділим (абсолютно твердим).
Висловлене твердження очевидне. Цей принцип широко використовується в інженерних розрахунках.
3. В’язі та їх реакції. Приклади в’язей
Тіло, яке може здійснювати із даного положення будь-які переміщення в просторі, називається вільним (наприклад, повітряна куля).
Тіло, переміщенню якого в просторі перешкоджають інші тіла, ті, які з’єднані чи дотикаються до нього, називається невільним.
Все те, що обмежує переміщення даного тіла в просторі, називають в’яззю. Оскільки в’язі реалізуються якимись тілами, то в’язями будемо називати самі тіла.
Прикладом невільних тіл є всякий механізм, де рухи окремих точок наперед геометрично обмежені; вантаж, що знаходиться на столі, тощо.
Очевидно, між тілами і в’язями існує система механічних взаємодій. Вплив тіла на в’язь називатимемо дією, тоді вплив в’язі на тіло буде протидією. Протидії в’язей, прикладених до твердого тіла, називаються реакціями в’язей.
Реакції в’язей напрямлені в бік, протилежний тому, куди в’язь не дає переміщатись тілу. Якщо в’язь чинить перешкоду в декількох напрямах, то напрямок реакції в’язі наперед невідомий і повинен визначатись у процесі розв’язання задачі.
Правильне визначення напрямків реакцій в’язей відіграє при розв’язанні задач механіки вкрай важливу роль. Розглянемо деякі випадки в’язей.
 1.Гладенька площина (поверхня) або опора. Гладенькою будемо називати поверхню, тертям об яку даного тіла можна знехтувати. Така поверхня не дає тілу рухатись тільки в напрямку спільного перпендикуляра (нормалі) до поверхонь тіл, що дотикаються, у точці їх дотикання (рис.7,а).
1.Гладенька площина (поверхня) або опора. Гладенькою будемо називати поверхню, тертям об яку даного тіла можна знехтувати. Така поверхня не дає тілу рухатись тільки в напрямку спільного перпендикуляра (нормалі) до поверхонь тіл, що дотикаються, у точці їх дотикання (рис.7,а).
Тому реакція  гладенької поверхні чи опори напрямлена по спільній нормалі до поверхонь тіл, що дотикаються, в точці їх дотикання і прикладена в цій точці. Якщо ж одна із поверхонь, що дотикаються, є точкою (рис.7,б), то реакція напрямлена по нормалі до іншої поверхні.
гладенької поверхні чи опори напрямлена по спільній нормалі до поверхонь тіл, що дотикаються, в точці їх дотикання і прикладена в цій точці. Якщо ж одна із поверхонь, що дотикаються, є точкою (рис.7,б), то реакція напрямлена по нормалі до іншої поверхні.
 2. Нерозтяжна нитка. В’язь, що здійснюється за допомогою гнучкої нерозтяжної нитки (рис.8), не дає тілу М віддалятись від точки підвішення нитки по напрямку АМ. Тому реакція
2. Нерозтяжна нитка. В’язь, що здійснюється за допомогою гнучкої нерозтяжної нитки (рис.8), не дає тілу М віддалятись від точки підвішення нитки по напрямку АМ. Тому реакція  натягнутої нитки напрямлена уздовж неї до точки її підвішення.
натягнутої нитки напрямлена уздовж неї до точки її підвішення.
 3. Циліндричний шарнір (підшипник). За допомогою циліндричного шарніра (або просто шарніра) здійснюється таке з’єднання двох тіл, коли одне тіло може обертатись відносно іншого навколо спільної осі, яка називається віссю шарніра.
3. Циліндричний шарнір (підшипник). За допомогою циліндричного шарніра (або просто шарніра) здійснюється таке з’єднання двох тіл, коли одне тіло може обертатись відносно іншого навколо спільної осі, яка називається віссю шарніра.
Якщо тіло АВ закріплене за допомогою шарніра до нерухомої опори D (рис.9), то точка А не може переміститись у жодному напрямку, перпендикулярному осі шарніра.
Отже, реакція циліндричного шарніра може мати будь-який напрямок у площині Аху. Для сили у цьому випадку невідомі ні її модуль, ні напрямок (кут α).
4. Сферичний шарнір. Тіла, з’єднані сферичним шарніром, можуть як завгодно повертатися одне відносно іншого навколо центра.
Реакція сферичного шарніра може мати будь-який напрямок у просторі. Для неї наперед невідомі ні її модуль, ні кути з осями Аxyz.
 5. Невагомий стержень. Невагомий – це такий стержень, вагою якого у порівнянні з діючим на нього навантаженням можна знехтувати. Нехай для тіла, що перебуває в рівновазі, такий стержень, закріплений у точках А і В шарнірами, є в’яззю (рис.11).
5. Невагомий стержень. Невагомий – це такий стержень, вагою якого у порівнянні з діючим на нього навантаженням можна знехтувати. Нехай для тіла, що перебуває в рівновазі, такий стержень, закріплений у точках А і В шарнірами, є в’яззю (рис.11).
Тоді на стержень будуть діяти тільки дві сили, прикладені в точках А і В; при рівновазі вони повинні бути напрямлені уздовж однієї прямої, тобто АВ. Але тоді на підставі закону про дію та протидію стержень буде діяти на тіло з силою, теж напрямленою уздовж АВ.
Отже, реакція невагомого шарнірно закріпленого прямолінійного стержня напрямлена уздовж осі стержня.
Питання для самоконтролю
1. Що вивчає статика? Її основні завдання.
2. Дати означення силі, системі сил, вільному тілу, зрівноважуючій та рівнодійній силам.
3. Які системи сил називаються еквівалентними, зрівноваженими, плоскими, просторовими?
4. Які це сили: зовнішні та внутрішні, збіжні та паралельні, зосереджені та розподілені?
5. Сформулювати п’ять аксіом статики та висновки до другої аксіоми.
6. Яке тіло називається невільним?
7. Що розуміють під в’яззю, реакцією в’язі? Як вони напрямлені?
8. Навести приклади в’язей та визначення напрямків їх реакцій.
Лекція №3
Тема “Система збіжних сил”
1. Геометричний спосіб додавання сил. Рівнодійна системи збіжних сил.
2. Розкладання сили на збіжні складові.
3. Проекція сили на вісь та площину. Аналітичний спосіб задання і додавання сил.
4. Умови рівноваги системи збіжних сил. Теорема про три непаралельні сили.
1.Геометричний спосіб додавання сил. Рівнодійна системи збіжних сил
Як було відзначено вище, системою збіжних сил називається система сил, лінії дії яких перетинаються в одній точці.
При розв’язанні задач механіки часто доводиться мати справу з операцію, відомою з векторної алгебри, – додаванням векторів, зокрема, сил. Величину, що дорівнює геометричній сумі сил якої-небудь системи, будемо надалі називати головним вектором цієї системи сил. Це поняття не слід плутати з поняттям рівнодійної. Для багатьох систем сил рівнодійної взагалі не існує (це ми побачимо дещо нижче), а геометричну суму (головний вектор) можна обчислити для будь - якої системи сил.
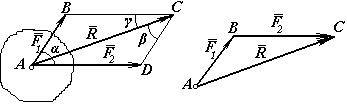
1. Додавання двох сил. Геометрична сума двох сил і знаходиться за правилом паралелограма (рис.1,а) або побудовою силового трикутника (рис.1,б), що зображає одну із половин цього паралелограма.
а) б)
Рис.1
Якщо кут між силами дорівнює α, то модульі кути γ і β обчислюються за формулами:


 2. Додавання трьох сил, що не лежать в одній площині. Геометрична сума трьох сил , ,
2. Додавання трьох сил, що не лежать в одній площині. Геометрична сума трьох сил , ,  , що не лежать в одній площині, зображається діагоналлю паралелепіпеда, побудованого на цих силах (правило паралелепіпеда). У справедливості цього твердження переконаємося, застосовуючи послідовно правило паралелограма (рис.2).
, що не лежать в одній площині, зображається діагоналлю паралелепіпеда, побудованого на цих силах (правило паралелепіпеда). У справедливості цього твердження переконаємося, застосовуючи послідовно правило паралелограма (рис.2).
3. Додавання системи сил. Геометрична сума (головний вектор) будь-якої системи сил визначається подвійно: або послідовним додаванням сил системи за правилом паралелограма, або побудовою силового многокутника. Другий спосіб простіший і зручніший. Щоб визначити цим способом суму сил , , ,..., (рис.3,а), відкладаємо від довільної точки О (рис.3,б) вектор  , що зображає в обраному масштабі силу , від точки а – вектор
, що зображає в обраному масштабі силу , від точки а – вектор , що зображає силу і т.д., від кінця m останнього вектора відкладаємо вектор
, що зображає силу і т.д., від кінця m останнього вектора відкладаємо вектор  , що зображає силу . З’єднавши початок першого вектора з кінцем останнього, дістанемо вектор
, що зображає силу . З’єднавши початок першого вектора з кінцем останнього, дістанемо вектор  , який зображає геометричну суму або головний вектор системи сил:
, який зображає геометричну суму або головний вектор системи сил:
 або
або  [*].
[*].

а) б)
Рис.3
4. Рівнодійна системи збіжних сил. Розглянемо систему збіжних сил, тобто таких сил, лінії дії яких перетинаються в одній точці (рис.3,а).
Оскільки сила, що діє на тверде тіло, є ковзним вектором, то система збіжних сил еквівалентна системі сил, прикладених в одній точці А (на рис.3,а).
Послідовно застосовуючи правило паралелограма сил, доходимо висновку, що система збіжних сил має рівнодійну, що дорівнює геометричній сумі (головному вектору) цих сил і прикладена в точці перетину їх ліній дій. Отже, система сил , , ,..., , зображена на рис.3,а, має рівнодійну, яка дорівнює їх головному вектору і прикладена в точці А (або в будь-якій іншій точці, котра лежить на лінії дії сили , проведеній через точку А).
2. Розкладання сил на збіжні складові
Розкласти дану силу на декілька складових – означає знайти таку систему декількох сил, для якої дана сила є рівнодійною. Це завдання невизначене і має однозначний розв’язок лише при заданні додаткових умов.
Розглянемо два окремих випадки, які зустрічаються найчастіше.
 1. Розкладання сили по двох відомих напрямках. Це завдання зводиться до побудови такого паралелограма, у якого сила, що розкладається, є діагоналлю, а сторони паралельні заданим напрямкам.
1. Розкладання сили по двох відомих напрямках. Це завдання зводиться до побудови такого паралелограма, у якого сила, що розкладається, є діагоналлю, а сторони паралельні заданим напрямкам.
Нехай сила розкладається по напрямках АВ і АD на сили і – складові сили (сила і прямі AB i AD звісно лежать в одній площині) (рис.4).
2. Розкладання сили по трьох напрямках. Якщо задані напрями не лежать в одній площині, то завдання є визначеним і зводиться до побудови такого паралелепіпеда, у якого діагональ зображає задану силу , а ребра паралельні заданим напрямкам (див. рис. 2).
Способом розкладання сил користуються для визначення сил тиску на в’язі.
 Задача. Нехай вантаж вагою
Задача. Нехай вантаж вагою  підвішений на двох тросах АС і ВС, які утворюють з горизонтальною прямою однакові кути α. Обчислити, з якою силою натягнені троси (рис.5).
підвішений на двох тросах АС і ВС, які утворюють з горизонтальною прямою однакові кути α. Обчислити, з якою силою натягнені троси (рис.5).
Розв’язання. Прикладемо силу у точці С і розкладемо її по напрямах тросів. Паралелограм у цьому випадку буде ромбом, діагоналі якого перпендикулярні між собою і поділяються в точці перетину пополам. Із трикутника аСb маємо:
 ,
,
звідки
 .
.
3. Проекція сили на вісь і площину. Аналітичний спосіб задання і додавання сил
Аналітичний спосіб розв’язання задач ґрунтується на використанні методу проекцій, знайомого нам із векторної алгебри. Оскільки він особливо важливий для механіки, нагадаємо його основи.
Проекція сили (як і будь-якого іншого вектора) на вісь – це алгебраїчна величина, що дорівнює добутку сили на косинус кута між силою і додатним напрямом осі. Якщо цей кут гострий, то проекція додатна, якщо тупий – від’ємна, а якщо сила перпендикулярна осі, то її проекція на вісь дорівнює нулю. Так, на рис.6:
Qx=Qcos b= –Qcos j = –dc;

 Проекцією сили на площину Оху називається вектор
Проекцією сили на площину Оху називається вектор  , що міститься між проекціями початку і кінця вектора сили на цю площину (рис.7).
, що міститься між проекціями початку і кінця вектора сили на цю площину (рис.7).
Таким чином, на відміну від проекції сили на вісь, проекція сили на площину є величиною векторною, оскільки характеризується не тільки модулем, а й напрямком на площині Оху.
У деяких випадках для знаходження проекції сили на вісь зручно спочатку знайти її проекцію на площину, в якій ця вісь лежить, а потім спроектувати знайдену проекцію на дану вісь. Наприклад, у випадку, зображеному на рис.7:
Fx=Fxy·cosφ=Fcosθcosφ;
Fy=Fxy·sinφ=Fcosθsinφ.
Аналітичний спосіб задання сил. Для аналітичного задання сили необхідно обрати систему координатних осей Oxyz, по відношенню до якої буде визначатись напрямок сили в просторі.
Вектор, що зображає силу , можна побудувати, якщо відомі модуль F цієї сили і кути α, β, γ, які сила утворює з координатними осями. Таким чином, величини F, α, β і γ задають силу . Точка прикладання сили повинна бути задана окремо її координатами x,y,z (рис.8).
Рис.8
 Для розв’язання задач механіки зручніше задавати силу її проекціями Fх, Fу, Fz на координатні осі. Знаючи ці проекції, можна визначити модуль сили і кути, які вона утворює з координатними осями, за формулами:
Для розв’язання задач механіки зручніше задавати силу її проекціями Fх, Fу, Fz на координатні осі. Знаючи ці проекції, можна визначити модуль сили і кути, які вона утворює з координатними осями, за формулами:
 ;
;

Якщо ж сили розташовані в одній площині, то кожну із них можна задати її проекціями на дві осі Ох і Оу. Тоді формули, що визначають силу за її проекціями, набудуть вигляду:


Аналітичний спосіб додавання сил. Цей спосіб базується на такій теоремі геометрії: проекція вектора суми на яку-небудь вісь дорівнює алгебраїчній сумі проекцій складових векторів на ту ж вісь.
Згідно цієї теореми, якщо є сумою сил , , ,..., , тобто
,..., , тобто  то
то 

 .
.
Знаючи Rx, Ry, Rz, за формулами знаходимо:

Для сил, які розташовані в одній площині, відповідні формули матимуть вигляд:



Ці формули дають можливість розв’язувати задачі про складання сил аналітично. Якщо сили задаються їх модулями та кутами, що вони утворюють з осями, то для застосування аналітичного методу додавання треба попередньо обчислити проекції цих сил на координатні осі.
 Задача. Знайти суму трьох сил, що лежать в одній площині, якщо відомо: F1 =15 Н; F2 =20 Н; F3 =10 Н; φ =600 (рис.9).
Задача. Знайти суму трьох сил, що лежать в одній площині, якщо відомо: F1 =15 Н; F2 =20 Н; F3 =10 Н; φ =600 (рис.9).
Розв’язання. Обчислимо проекції цих сил на координатні осі:
F1x =0, F2x =20 H; F3x = F3·cos 600=10· =5(H);
=5(H);
F1y = –15 H, F2y =0, F3y = F3·sin 600=10· = 8,5(H);
= 8,5(H);
Rx = 0+20+5=25(H); Ry =
0+20+5=25(H); Ry = –15+0+8,5=–6,5(H);
–15+0+8,5=–6,5(H);  ;
;
4. Умови рівноваги системи збіжних сил. Теорема про три непаралельні сили
Для рівноваги системи збіжних сил, прикладених до твердого тіла, необхідно і достатньо, щоб рівнодійна, а, отже, і головний вектор цих сил дорівнювали нулю.
Умови, яким повинні задовольняти ці сили, можна виразити в геометричній або аналітичній формі.
1. Геометрична умова рівноваги. Оскільки головний вектор (див. рис.3) системи збіжних сил визначається як замикальна сторона силового многокутника, побудованого із цих сил, то він може дорівнювати нулю, тоді, коли кінець останньої сили в многокутнику збіжиться з початком першої сили, тобто коли многокутник замкнеться.
Отже, для рівноваги системи збіжних сил необхідно і достатньо, щоб силовий многокутник, побудований із цих сил, був замкнутим.
2.Аналітичні умови рівноваги. Аналітично модуль головного вектора системи сил визначається за формулою:
Оскільки під коренем стоїть сума додатних складових, то R може дорівнювати нулю тільки тоді, коли одночасно Rx=0, Ry=0, Rz=0,тобто коли сили, що діють на тіло, будуть задовольняти рівності:

Ці рівності і виражають умови рівноваги системи збіжних сил в аналітичній формі: для рівноваги просторової системи збіжних сил необхідно і достатньо, щоб алгебраїчні суми проекцій цих сил на кожну з трьох координатних осей дорівнювали нулю.
Якщо всі збіжні сили, що діють на тіло, лежать в одній площині, то вони утворюють плоску систему збіжних сил. У цьому випадку дістанемо тільки дві умови рівноваги:

тобто для рівноваги плоскої системи збіжних сил необхідно і достатньо, щоб алгебраїчні суми проекцій цих сил на дві координатні осі дорівнювали нулю.
 Теорема про три непаралельні сили. Якщо тіло перебуває в рівновазі під дією трьох непаралельних сил, які лежать в одній площині, то лінії дії всіх трьох сил перетинаються в одній точці.
Теорема про три непаралельні сили. Якщо тіло перебуває в рівновазі під дією трьох непаралельних сил, які лежать в одній площині, то лінії дії всіх трьох сил перетинаються в одній точці.
Доведення. Спочатку розглянемо які-небудь дві сили і , що діють на тіло. Оскільки вони лежать в одній площині і непаралельні, то їх лінії дії перетинаються в деякій точці А (рис.10). Прикладемо сили і в одній точці й замінимо їх рівнодійною . Тоді на тіло будуть діяти дві сили: та , прикладена в деякій точці В тіла. Якщо тіло перебуває у рівновазі, то сили і повинні бути напрямлені по одній прямій, тобто уздовж АВ. Отже, лінія дії теж проходить через точку А, що і вимагалось довести.
Обернена теорема не має місця, тобто якщо лінії дії трьох сил перетинаються в одній точці, то тіло під дією цих сил може і не перебувати в рівновазі. Отже, теорема виражає тільки необхідну умову рівноваги тіла під дією трьох сил.
Питання для самоконтролю
1. Як додаються дві сили?
2. Як додати три сили, що не лежать у одній площині?
3. Геометричний спосіб додавання багатьох сил.
4.Чи має система збіжних сил рівнодійну? Як вона визначається?
5.Як розкласти силу по двох напрямках?
6.Як розкладається сила по трьох напрямках, що не лежать у одній площині?
7.Що називається проекцією сили на вісь, площину?
8. Як сила задається аналітично?
9.На якій теоремі ґрунтується аналітичний спосіб додавання сил?
10. Як додати сили аналітично?
11.Сформулювати умови рівноваги плоскої та просторової системи збіжних сил (геометричні й аналітичні).
12.Сформулювати теорему про три непаралельні сили. Довести її.
Лекція № 4
Тема: “Система паралельних сил. Центр ваги твердого тіла”
1.Паралельні сили. Додавання двох паралельних сил.
3.Центр ваги твердого тіла. Координати центрів ваги однорідних тіл.
1.Паралельні сили. Додавання двох паралельних сил
Як ми відзначали в другій лекції, паралельними називаються сили, лінії дії яких паралельні одна одній.
Спочатку з’ясуємо, як можна додати дві паралельні сили. Правило паралелограма у цьому випадку застосовувати безпосередньо неможливо, оскільки точка перетину таких сил лежить у нескінченності.
1.1. Додавання двох паралельних сил, напрямлених в один бік
Нехай на дане тіло діють дві паралельні сили і , напрямлені в один бік (рис.1). Необхідно знайти їх рівнодійну. Для цього в точках прикладання А і В цих сил прикладемо дві однакові за модулем сили  і
і  , напрямлені по прямій АВ у протилежні боки. Система чотирьох сил , , і еквівалентна даній системі сил і , про що свідчить друга аксіома статики. Додавши тепер силу до сили і силу до сили , дістанемо дві уже непаралельні сили
, напрямлені по прямій АВ у протилежні боки. Система чотирьох сил , , і еквівалентна даній системі сил і , про що свідчить друга аксіома статики. Додавши тепер силу до сили і силу до сили , дістанемо дві уже непаралельні сили  і
і  ; перенесемо ці сили в точку О перетину їх напрямків, так що вони зобразяться відповідно векторами
; перенесемо ці сили в точку О перетину їх напрямків, так що вони зобразяться відповідно векторами  і
і  .Тепер поступимо навпаки: силу розкладемо на дві сили і , а силу на дві сили і .
.Тепер поступимо навпаки: силу розкладемо на дві сили і , а силу на дві сили і .
Рівнодійна сил і дорівнює нулю, а тому залишається додати дві сили і , прикладені в точці О і напрямлені по одній прямій. Їх рівнодійна напрямлена по тій же прямій, а модуль її дорівнює сумі модулів складових сил, тобто R=F1+F2.
Ця сила , очевидно, є шуканою рівнодійною двох заданих паралельних сил.
Перенесемо точку прикладання цієї сили уздовж її лінії дії в точку С, яка лежить на прямій АВ, і визначимо положення цієї точки С на згаданій прямій. Із подібних трикутників маємо:
 і
і 
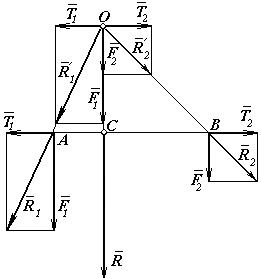
Рис.1
Розділивши першу рівність на другу і беручи до уваги, що T1=T2, дістанемо:
 або
або  ;
;
 .
.
Звідси,
 .
.
Отже, точка С ділить пряму АВ на частини, обернено пропорційні складовим силам. Таким чином, ми дійшли висновку:
Рівнодійна двох паралельних сил, напрямлених в один бік, їм паралельна, напрямлена в той же бік і дорівнює за модулем сумі їх модулів; лінія дії рівнодійної лежить між лініями дії складових сил на відстанях від них, обернено пропорційних модулям цих сил.
1.2. Додавання двох паралельних сил, напрямлених в протилежні боки
Нехай маємо тепер дві паралельні сили і , прикладені в точках А та В і напрямлені в протилежні боки; такі сили називаються антипаралельними. Нехай F1>F2, визначимо рівнодійну цих сил (рис.2).
Для цього замінимо силу двома еквівалентними їй паралельними силами: силою  , прикладеною в точці В, причому
, прикладеною в точці В, причому  , і силою , прикладеною в деякій точці С (рис.2).
, і силою , прикладеною в деякій точці С (рис.2).
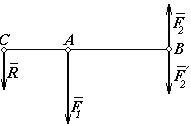
Рис.2
Оскільки сила повинна бути еквівалентна силам і , тобто є їх рівнодійною, то на основі попереднього результату будемо мати:
F1= +R=F2+R, тобто R=F1–F2;
+R=F2+R, тобто R=F1–F2;
 .
.
Звідси
 .
.
Із попередньої пропорції маємо:
 або
або  і .
і .
Оскільки і взаємно зрівноважуються, то в результаті залишається тільки сила , яка є шуканою рівнодійною двох антипаралельних сил і .
Таким чином, рівнодійна двох нерівних за модулем паралельних сил, напрямлених у протилежні боки, їм паралельна, напрямлена в бік більшої сили і дорівнює за модулем різниці їх модулів; лінія дії рівнодійної лежить за більшою силою на відстанях від ліній дії складових сил, обернено пропорційних модулям цих сил.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 2889; Нарушение авторских прав?; Мы поможем в написании вашей работы!