КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Слайд 4. Структура сотового телефона
|
|
|
|
Слайд 3. Стенд по диагностике программного обеспечения АСУТП
Слайд 2. Распределённая АСУ ТП.
Конечно же, свойства всей системы управления определяются свойствами отдельных элементов и порядком их соединения между собой.
Главным элементом системы является объект управления. Он характеризуется в первую очередь с татичекой характеристикой – это зависимость критерия управления, Y(t), от управляющей переменной, X(t):
 .
.
Различают линейные объекты – это объекты, уравнение статической характеристики у которого имеют вид:

Большой класс объектов управления имеет нелинейные статические характеристики – это объекты, уравнения статики которых имеют следующий вид:

Например, при Е=0.5, D=A=C=0, B=K
 ,
,
Или, при E=1, D=2 статическая характеристика принимает видквадратного уравнения:  . Это пожалуй самый распространенный вид статической характеристики.
. Это пожалуй самый распространенный вид статической характеристики.
Например, на рисунке (слайд 5) представлено поле экспериментальных данных эффективности работы тепловой электростанции по себестоимости вырабатываемой электроэнергии. Из рисунка видно, что максимальная эффективность тепловой электростанции как суммы эффективностей работы котлоагрегата и турбогенератора совпадает с минимальной себестоимостью выработанной электроэнергии. Все кривые на (слайде 5) результат аппроксимации методом наименьших квадратов экспериментальных данных, снятых на реальном технологическом процессе. При этом, критерий управления котлоагрегатом – это уравнение измерения текущего значения эффективности работы котлоагрегата, которое имеет вид:
ЭРК(iTS) = - 0.025GГ(iTS)2+2.961GГ(iTS)-173.654,
а критерий управления турбоагрегатом – это уравнение измерения текущего значения эффективности работы турбогенератора, которое имеет вид:
ЭРТ(iTS)= -0.014GПП(iTS)2 + 3.385GПП(iTS) - 201.975.
При этом, критерий управления электростанцией - это уравнение измерения текущего значения технологической себестоимости электроэнергии энергоблока (см. рис. 1.2) по топливу, XC, которое имеет вид:
CЭБ(iTS) = 0.0214GГ(iTS)2 + 3.841GГ(iTS) - 190.021
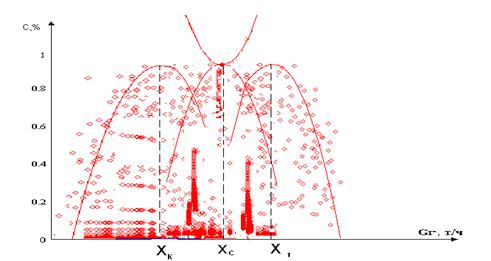
Слайд 5. Поле экспериментальных данных эффективности работы электростанции
На (слайде 6) представлено поле экспериментальных данных по управлению котлоагрегатом и турбогенератором. Из рисунка видно, что наиболее эффективная работа тепловой электростанции достигается при компромиссном решении между расходом газа для обеспечения максимальной эффективности работы котлоагрегата, XK и расходом газа для обеспечения максимальной эффективности работы турбогенератора, XT.
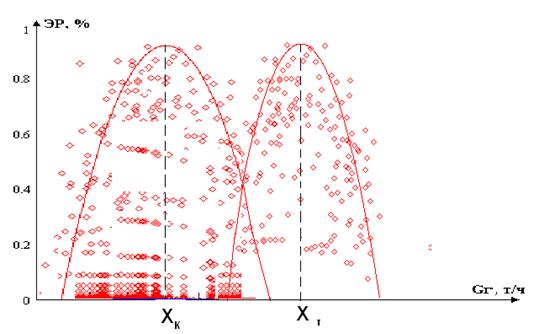
Слайд 6 Поле экспериментальных данных эффективности работы котлоагрегата и турбогенератора.
Уравнения статики объекта управления могут быть представлены уравнениями в частных производных по пространственным координатам производимого продукта. При этом качество изделия прогнозируется уравнениям математической физики при нулевых начальных условиях по реальному времени:
 ,
,
где 
 [
[ /с] - коэффициенты температуропроводности;
/с] - коэффициенты температуропроводности;
Сp=[ ] - теплоемкость на единицу длины.
] - теплоемкость на единицу длины.
В этом случае, в качестве критерия управления мы имеем функцию распределения температурного поля по объему получаемого продукта (см. слайд 7).

Слайд 7 Температурные поля в пластмассовом образце.
Статические характеристики объекта управления, обычно, выступают в роли критериев управления при автоматизации производств.
При автоматизации технологических процессов на первое место выдвигаются д инамические характеристики объекта управления – это траектории перемещения объекта управления из одного состояния равновесия в другое. В общем случае, динамические характеристики описывается дифференциальным уравнением N –ого порядка.
где X(t) – это управляющее воздействие на систему.
Наиболее распространенным является объект второго порядка, имеющий модель в виде движущегося элементарного объема в реальном времени:

Из наиболее значимых управляющих воздействий X(t) следует отметить (слайд 8): единичный скачок, единичный импульс, синусная волна, прямоугольная волна и треугольная волна.
Если управляющим воздействием является единичная ступенчатая функция:
 ,
,
то динамическая характеристика объекта управления, Y(t), носит название переходный процесс.
Если управляющим воздействием является прямоугольный импульс, который имеет модель вида:

то динамическая характеристика, Y(t), носит название весовая функция.
Свойства прямоугольного импульса широко используются при применении вычислительной техники в задачах автоматического управления технологическими процессами. Эти свойства на прямую стыкуются со свойствами функции Дирака:  , основным из которых является свойство:
, основным из которых является свойство:  .
.
Таким образом, динамическая характеристика – это реакция объекта управления на типовое возмущение.
Если объект управления задан в виде математической модели, то динамическая характеристика - это решение, Y(t), этого дифференциального уравнения при типовом возмущении, Х(t):
 .
.
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 331; Нарушение авторских прав?; Мы поможем в написании вашей работы!