КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управляющие устройства приводов постоянного тока
|
|
|
|
Импульсные преобразовательные устройства
Импульсные преобразователи достаточно подробно рассмотрены в курсе электроники.
В настоящее время импульсные преобразователи выполняются на основе широтно-импульсных преобразователей, построенных на транзисторах.
Напомним, что назначение УУ заключается в выработке некоторого управляющего сигнала, который обеспечивал бы движение рабочих органов машины электропривода по заданному закону.
При построении управляющих устройств руководствуются следующими основными принципами:
1) в УУ формируется задающий сигнал, указывающий заданный закон движения РОМ;
2) к УУ подводятся сигналы обратных связей, указывающих фактическое движение объекта управления;
3) обратные связи организуются по всем переменным состояния, которые описывают объект управления, т.е. количество обратных связей должно быть равно порядку объекта управления; объектом управления может быть двигатель, механическая часть либо механическая часть вместе с преобразовательным устройством; напомним, что подобная организация обратных связей обоснована в теории управления при условии, что управление находится путём оптимизации процессов системы управления по среднеквадратичному критерию качества;
4) УУ должно обеспечивать возможность независимой поочередной настройки переменных состояния на желаемый закон их изменения в переходных процессах, что существенно упрощает и ускоряет процесс наладки электроприводов;
УУ могут быть синтезированы следующими общими методами, известными в теории управления:
1) с использованием логарифмических амплитудно-частотных характеристик;
2) методом пространства состояний, в котором УУ вырабатывает сигнал управления  по закону
по закону
 , (1)
, (1)
где  – матрица коэффициентов обратных связей;
– матрица коэффициентов обратных связей;  – вектор переменных состояния.
– вектор переменных состояния.
В этом методе коэффициенты матрицы обратной связи из соотношения (1) назначаются по определённому алгоритму.
Эти методы отвечают трём первым принципам, сформулированным выше, но не позволяют реализовать возможность независимой поочередной настройки каждой регулируемой переменной (четвёртый принцип). Например, изменение какого-либо коэффициента матрицы приводит к изменению всех характеристических чисел и, как следствие, к одновременному изменению переходных процессов для всех переменных состояния.
Всем четырем сформулированным выше принципам построения управляющих устройств электроприводов отвечает метод подчиненного управления. Поясним реализацию этого метода на примере построения электропривода постоянного тока с якорным управлением при условии, что регулируется скорость двигателя (рисунок 1).
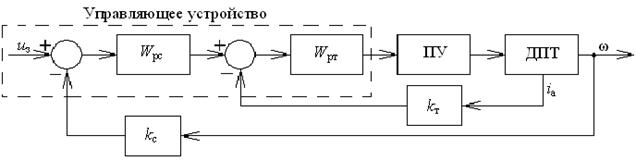
Рисунок 1 – Структурная схема электропривода постоянного тока с подчиненным управлением скоростью двигателя по якорной цепи:
 – задающий сигнал;
– задающий сигнал;  – передаточная функция регулятора скорости;
– передаточная функция регулятора скорости;  – передаточная функция регулятора тока;
– передаточная функция регулятора тока;  – коэффициенты передачи соответственно датчиков скорости и тока;
– коэффициенты передачи соответственно датчиков скорости и тока;  – ток якоря ДПТ;
– ток якоря ДПТ;  – угловая скорость ДПТ
– угловая скорость ДПТ
При построении указанного электропривода предполагается, что объект управления – это двигатель постоянного тока с якорным управлением (ДПТ). Такой объект управления имеет второй порядок, т.к. описывается системой дифференциальных уравнений второго порядка. Переменными состояния этого объекта являются угловая скорость и якорный ток . Следовательно, электропривод должен иметь две обратные связи по указанным переменным состояния. Обратные связи при подчинённом управлении организуются так, что они оказываются, как бы, вложенными друг в друга. При этом в случае двух обратных связей одна из них образует внутренний контур, а другая – внешний (см. рис.1). Внутренний контур организуется по наименее инерционной величине, т.е. в данном случае по току якоря . Внешний контур организуется по наиболее инерционной величине, т.е. в данном случае по угловой скорости .
Если электропривод будет регулировать угол поворота ротора, тогда он должен содержать три контура. При этом внешним будет контур по углу как наиболее инерционной величине.
Каждый контур содержит свой вычитатель и свой регулятор. Контур по току содержит регулятор тока (РТ) с передаточной функцией  , а контур по угловой скорости – регулятор скорости (РС) с передаточной функцией
, а контур по угловой скорости – регулятор скорости (РС) с передаточной функцией  . Вычитатели и регуляторы образуют управляющее устройство.
. Вычитатели и регуляторы образуют управляющее устройство.
Рассмотренная структура электропривода обеспечивает возможность независимой поочередной настройки тока и скорости при условии, что вначале настраивается переходный процесс по току только с помощью РТ, а затем по скорости только с помощью РС. Объясняется такая возможность следующим.
Угловая скорость изменяется более медленно, чем ток . Поэтому в период переходного процесса по току можно считать, что скорость =const. Физически это означает, что скорость не возмущает вход контура регулирования тока (т.е. вход «+» второго вычитателя на рис.1) и, следовательно, не влияет на вид переходного процесса по току. Поэтому при подборе желаемого переходного процесса по току влиянием скорости можно пренебречь. На языке структурных схем это означает, что при подборе желаемого переходного процесса по току можно отбросить все элементы, преобразующие скоростьвне контура регулирования тока, и использовать для этой цели такой оставшийся элемент контура тока как РТ. Остальные элементы контура тока входят в неизменяемую часть электропривода и поэтому не могут быть использованы для подбора желаемого переходного процесса по току . Приходим, таким образом, к выводу, что настройка тока может быть выполнена независимо от свойств элементов, входящих в контур скорости и, в частности, от свойств РС. Это означает, что при любой передаточной функции РС переходный процесс по току не изменяется, и, следовательно, после выбора РТ регулятор скорости можно выбирать, исходя только из условия получения желаемого переходного процесса по скорости, поскольку передаточная функция РС не влияет на быстротекущий переходный процесс по току. Изложенное показывает, таким образом, что рассмотренная структура электропривода позволяет придать желаемый вид вначале переходному процессу по току с помощью РТ, а затем – по скорости с помощью РС. Причем в ходе придания желаемого переходного процесса по скорости переходный процесс по току практически не изменяется. Это и означает, что рассмотренная структура электропривода обеспечивает возможность независимой поочередной настройки тока и скорости.
Дадим определение. Определение передаточных функций регуляторов, которые обеспечивают желаемое протекание переходных процессов, называются настройкой регуляторов.
Рассмотрим настройку РТ и РС в соответствии с методом подчиненного регулирования. В практических схемах электроприводов применяют два основных вида настроек: на технический оптимум (ТО) и на симметричный оптимум (СО). При настройке на ТО электроприводы имеют, во-первых, наилучшие для линейных систем переходные процессы (малое время переходного процесса, которое соизмеримо с наименьшей постоянной времени электропривода; малое перерегулирование). Во-вторых, имеют в установившемся режиме нулевую ошибку по сигналу управления. Но обладают в установившемся режиме статической ошибкой, которая прямо пропорциональна статическому моменту сопротивления нагрузки. Эта ошибка для некоторых марок электродвигателей может достигать неприемлемых значений. При настройке на СО переходные процессы в электроприводах протекают с большим перерегулированием, равным 43%. Но при этом электроприводы не имеют в установившемся режиме ошибок как по каналу управления, так и по каналу возмущения со стороны статического момента сопротивления нагрузки.
Рассмотрим процедуру настройки регуляторов на ТО. Настройка регуляторов на ТО начинается, как отмечалось выше, с внутреннего контура и производится для каждого контура следующим образом. В настраиваемом контуре находят минимальную постоянную времени  . Затем передаточную функцию выбирают так, чтобы замкнутый контур имел желаемую передаточную функцию
. Затем передаточную функцию выбирают так, чтобы замкнутый контур имел желаемую передаточную функцию
 , (2)
, (2)
где  – коэффициент датчика обратной связи.
– коэффициент датчика обратной связи.
Передаточная функция из (2) есть передаточная функция фильтра Баттерворта второго порядка.
Выбор регулятора по соотношению (2) называется настройкой регулятора на технический оптимум. При этом замкнутый контур называют контуром, настроенным на ТО.
В этом контуре переходный процесс по регулируемой переменной будет иметь перерегулирование  =4,3%, время переходного процесса
=4,3%, время переходного процесса  =4,1
=4,1 и нулевую статическую ошибку по управлению.
и нулевую статическую ошибку по управлению.
График такого переходного процесса, например, для якорного тока , будет иметь вид, представленный на рисунке 2.
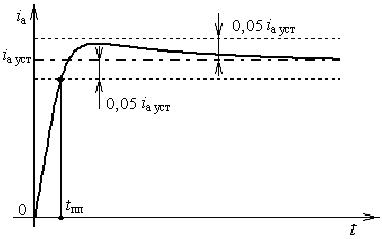
Рисунок 2 – График переходного процесса по якорному току
при настройке контура регулирования тока на технический оптимум
Отметим, что указанный переходный процесс имеет следующие особенности:
· во-первых, выходной сигнал попадает в 10%-ую зону (см. рисунок 2) при первом пересечении границы этой зоны; поэтому переходный процесс завершается достаточно быстро, т.е. система имеет высокое быстродействие;
· во-вторых, переходный процесс идёт плавно, без резких скачков, что является особенно важным для механических переходных процессов.
Рассмотрим далее методику настройки на ТО контура тока. Настройка начинается с составления детальных структурных схем элементов этого контура. Составим вначале структурную схему двигателя постоянного тока (ДПТ) с якорным управлением, исходя из точной структурной схемы, известной из курса теории электрических машин. Двигатель при настройке на ТО представляется в виде упрощенной структурной схемы, которая получается из точной при следующих допущениях:
1) обратная связь по противо-ЭДС отсутствует, что объясняется следующим; противо-ЭДС прямо пропорциональна угловой скорости двигателя, которая является более инерционной величиной, чем ток якоря. Поэтому переходные процессы по току якоря завершаются практически при некотором постоянном значении противо-ЭДС, то есть последняя не успевает повлиять на изменение тока, и, следовательно, при изучении динамики контура тока можно пренебречь влиянием противо-ЭДС;
2) момент сопротивления  , что объясняется следующим; момент
, что объясняется следующим; момент  не влияет на характеристическое уравнение системы и поэтому может быть выбран любым; для простоты полагаем, что .
не влияет на характеристическое уравнение системы и поэтому может быть выбран любым; для простоты полагаем, что .
С учетом данных допущений структурная схема ДПТ с якорным управлением принимает вид, представленный на рис. 1.

Рис. 1. Упрощенная структурная схема ДПТ с якорным управлением
Для организации обратной связи по току  якоря необходимо выделить на схеме (см. рис. 1) ток в явном виде. Для этого выполним эквивалентное преобразование указанной схемы, так как это показано на рис. 2.
якоря необходимо выделить на схеме (см. рис. 1) ток в явном виде. Для этого выполним эквивалентное преобразование указанной схемы, так как это показано на рис. 2.

Рис. 2. Эквивалентная упрощенная структурная схема ДПТ с якорным управлением
Составим далее структурные схемы преобразовательного устройства (ПУ), датчика тока и регулятора тока, которые входят в контур тока. Будем полагать, что ПУ можно представить в первом приближении апериодическим звеном первого порядка с постоянной времени  , датчик тока – пропорциональным звеном с коэффициентом передачи
, датчик тока – пропорциональным звеном с коэффициентом передачи  , а регулятор тока – звеном с передаточной функцией . Полагаем, что величины и известны, а величина подлежит выбору. Учитывая изложенное, структурная схема замкнутого контура тока якоря примет вид, изображенный на рис. 3.
, а регулятор тока – звеном с передаточной функцией . Полагаем, что величины и известны, а величина подлежит выбору. Учитывая изложенное, структурная схема замкнутого контура тока якоря примет вид, изображенный на рис. 3.
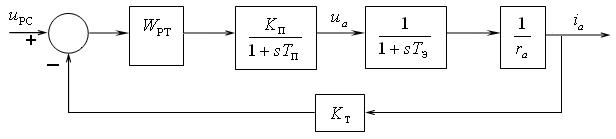
Рис. 3. Структурная схема системы регулирования тока якоря
Находим, как отмечалось выше, минимальную постоянную времени контура. Здесь две постоянных времени:  . Обычно
. Обычно
 , (3)
, (3)
где  мс для тиристорных преобразователей. Таким образом, минимальная постоянная времени контура тока
мс для тиристорных преобразователей. Таким образом, минимальная постоянная времени контура тока
 . (4)
. (4)
С учетом (2) и (4) желаемая передаточная функция замкнутого контура регулирования тока должна иметь, очевидно, следующий вид:
 . (5)
. (5)
По известной желаемой передаточной функции  замкнутого контура тока и известным передаточным функциям ДПТ, ПУ и датчика тока можно определить передаточную функцию регулятора тока. Сделаем это, используя следующий прием. Нетрудно показать, что для получения желаемой передаточной функции замкнутой системы в виде (2) необходимо, чтобы передаточная функция разомкнутого контура этой системы
замкнутого контура тока и известным передаточным функциям ДПТ, ПУ и датчика тока можно определить передаточную функцию регулятора тока. Сделаем это, используя следующий прием. Нетрудно показать, что для получения желаемой передаточной функции замкнутой системы в виде (2) необходимо, чтобы передаточная функция разомкнутого контура этой системы  имела следующий вид
имела следующий вид
 . (6)
. (6)
Тогда в случае контура тока его желаемая разомкнутая передаточная функция  будет, очевидно, иметь вид
будет, очевидно, иметь вид
 . (7)
. (7)
Для контура тока его фактическая разомкнутая передаточная функция  , как это видно из схемы на рис. 3, задается соотношением
, как это видно из схемы на рис. 3, задается соотношением
 . (8)
. (8)
Приравняв фактическую передаточную функцию разомкнутого контура тока желаемой , нетрудно получить из (7) и (8) передаточную функцию РТ
 . (9)
. (9)
Передаточная функция РТ из (9) может быть преобразована к виду
 . (10)
. (10)
Из (10) видно, что РТ состоит из параллельно включенных интегратора с передаточной функцией  и пропорционального звена с передаточной функцией
и пропорционального звена с передаточной функцией  , то есть является ПИ-регулятором.
, то есть является ПИ-регулятором.
На этом настройка РТ заканчивается. Заметим в заключение, что соотношение (9) указывает на следующий физический смысл выполненной настройки РТ. РТ компенсирует наибольшую постоянную времени контура тока  , т.к. при определении передаточной функции разомкнутого контура тока множитель
, т.к. при определении передаточной функции разомкнутого контура тока множитель  в числителе передаточной функции РТ сокращается с аналогичным множителем, находящимся в знаменателе передаточной функции остальных элементов контура тока.
в числителе передаточной функции РТ сокращается с аналогичным множителем, находящимся в знаменателе передаточной функции остальных элементов контура тока.
Аналогичные рассуждения можно провести для настройки контура скорости на технический оптимум. Заметим, что в этом случае наибольшей постоянной времени является постоянная времени  .
.
Наименьшая постоянная времени  контура скорости может быть определена так. Примем гипотезу, что в полосе пропускания электропривода (до 20…100 Гц) для передаточной функции
контура скорости может быть определена так. Примем гипотезу, что в полосе пропускания электропривода (до 20…100 Гц) для передаточной функции  из (5) справедливо
из (5) справедливо
 , (11)
, (11)
т.е. что в знаменателе (5) можно пренебречь слагаемым  . Тогда для контура регулирования скорости минимальная постоянная времени
. Тогда для контура регулирования скорости минимальная постоянная времени
 . (12)
. (12)
Рассуждая далее аналогично выбору РТ, можно показать, что РС представляет собой пропорциональное звено с передаточной функцией
 . (13)
. (13)
Можно показать также, что передаточная функция по скорости  замкнутого электропривода при принятых выше упрощающих допущениях имеет вид
замкнутого электропривода при принятых выше упрощающих допущениях имеет вид
 . (26)
. (26)
При этом электропривод имеет следующие технические характеристики:
 ,
,  , (27)
, (27)
где  – перерегулирование по угловой скорости;
– перерегулирование по угловой скорости;  – время регулирования по угловой скорости.
– время регулирования по угловой скорости.
Недостаток данного способа настройки регуляторов, т.е. настройки обоих контуров на ТО, состоит в том, как это отмечалось выше, в большой ошибке (для некоторых электроприводов) при воздействии момента сопротивления нагрузки. На языке механических характеристик (МХ) это означает, что их жесткость (для некоторых электроприводов) оказывается весьма низкой. Напомним, что низкая жесткость МХ означает, что график зависимости  имеет слишком большой наклон в диапазоне электромагнитных моментов
имеет слишком большой наклон в диапазоне электромагнитных моментов  (см. рис. 4).
(см. рис. 4).
Рисунок 4 – МХ электропривода при настройке контуров тока якоря и скорости на технический оптимум
Для устранения этого недостатка РС и соответственно контур регулирования скорости настраивают на так называемый симметричный оптимум (СО). В этом случае РС, как это можно показать, является ПИ-регулятором, а МХ электропривода оказывается абсолютно жесткой (см. рис. 5).
Рисунок 5 – МХ электропривода при настройке контура регулирования скорости на симметричный оптимум
При такой настройке электропривода переходный процесс по скорости оказывается более динамичным. Величина перерегулирования по скорости составляет 43%, а время регулирования –  . Для снижения перерегулирования в этом случае электропривод дополняется задатчиком интенсивности (ЗИ) так, как это показано на рис. 6.
. Для снижения перерегулирования в этом случае электропривод дополняется задатчиком интенсивности (ЗИ) так, как это показано на рис. 6.
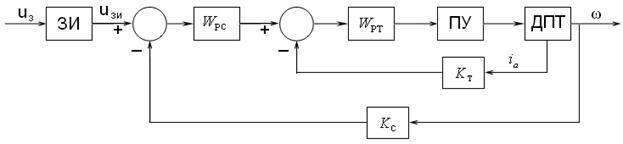
Рис. 6 – Структурная схема электропривода при настройке контура регулирования скорости на симметричный оптимум
Задатчик интенсивности срезает крутой передний фронт задающего сигнала (см. рис. 7). При этом на вход электропривода приходит сигнал  с более плавным фронтом. Время фронта
с более плавным фронтом. Время фронта  сигнала выбирается таким образом, чтобы обеспечить заданное перерегулирование по скорости.
сигнала выбирается таким образом, чтобы обеспечить заданное перерегулирование по скорости.
Рис. 7. Диаграммы работы задатчика интенсивности
Недостаток настроек на ТО и СО заключается в больших бросках якорных токов, которые могут превышать допустимые. Для устранения этого недостатка в систему после регулятора скорости, т.е. после передаточной функции (см. рис. 6), добавляют нелинейный элемент типа “насыщение”, который совместно с контуром регулирования тока обеспечивает ограничение якорного тока на требуемом уровне.
3. ЭЛЕКТРОПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Электроприводы переменного тока по типу двигателя делятся на:
- асинхронные;
- синхронные;
- вентильные;
- шаговые;
- с бесконтактными двигателями постоянного тока.
В синхронных электроприводах используются синхронные двигатели классической конструкции. Эти двигатели имеют существенный недостаток – выпадают из синхронизма при резком изменении нагрузки. Поэтому при необходимости использовать синхронные двигатели применяют шаговые либо вентильные электроприводы, либо электроприводы с бесконтактными двигателями постоянного тока.
В вентильных электроприводах используются вентильные двигатели. Напомним, что вентильный двигатель по конструкции напоминает синхронный двигатель классической конструкции, который обладает некоторыми дополнительными узлами: датчиком положения ротора и электронным коммутатором. Электронный коммутатор согласует управляющий сигнал, задающий частоту вращения ротора, и сигнал с датчика положения ротора таким образом, чтобы исключить выпадение из синхронизма. Особенность вентильного двигателя в том, что его ротор выполняется в виде постоянного магнита. В шаговых электроприводах используются шаговые двигатели. Шаговый двигатель обладает следующим недостатком: потерей шага при большой частоте поступающих сигналов управления. Если шаговый двигатель дополнить датчиком положения ротора и электронным коммутатором, то потери шага можно исключить. Такой двигатель называют бесконтактным двигателем постоянного тока, а электропривод на его основе – электроприводом с БДПТ.
Наиболее перспективные электроприводы – электроприводы с бесконтактными двигателями постоянного тока и вентильные электроприводы.
В настоящее время широко распространены асинхронные электроприводы, построенные на основе асинхронных двигателей. Асинхронные электроприводы по быстродействию и по диапазону регулирования частоты в настоящее время сопоставимы с быстродействием и диапазоном регулирования электроприводов постоянного тока, но надежность асинхронных электроприводов в несколько раз выше.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 1712; Нарушение авторских прав?; Мы поможем в написании вашей работы!