КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тахогенераторы постоянного тока
|
|
|
|
Микромашины постоянного тока
Представляют собой небольшие генераторы с независимым возбуждением или с возбуждением от постоянных магнитов. Конструктивно не отличаются от обычных машин постоянного тока малой мощности.
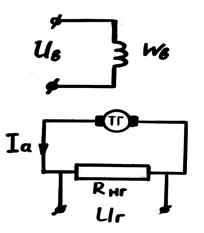
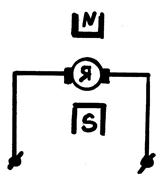
Принципиальная схема тахогенератора представлена на рисунке 4.1.1:
Рисунок 4.1.1
Входное напряжение тахогенератора изменяется по закону:
a - угол поворота;
k – постоянная величина.
n- частота вращения якоря.
Основным требованием к тахогенераторам является линейность выходной характеристики.
Тахогенераторы служат для преобразования механического перемещения в электрический сигнал – UВЫХ.
Выходное напряжение тахогенератора UГ может быть выражено как напряжение обычного генератора постоянного тока, через ЭДС якоря Еа, падение напряжения в обмотке якоря ( ) и падение напряжения на щеточном контакте DUЩ.
) и падение напряжения на щеточном контакте DUЩ.
 (1)
(1)
следует выразить ЭДС якоря через магнитный поток и частоту вращения якоря:
 (2) А ток якоря, выразить через напряжение на выходе и сопротивление нагрузки RНГ.
(2) А ток якоря, выразить через напряжение на выходе и сопротивление нагрузки RНГ.
 (3)
(3)
Подставив в (1), можно получить:
 (4),
(4),
проведя преобразования, можно записать:
 (5)
(5)
Если пренебречь падением напряжения на щеточном контакте, (т.е. принять DUЩ=0) выражение выходного напряжения примет вид:
 (6)
(6)
При постоянных потоке, сопротивлении якоря и нагрузки(Ф=const, ra=const, RНГ=const)
 , т.е. прямо пропорционально частоте вращения.
, т.е. прямо пропорционально частоте вращения.
Зависимость напряжения на выходе тахогенератора UГ от частоты вращения якоря n называется выходной характеристикой.
Отклонение  обозначается через k и называется крутизной выходной характеристики:
обозначается через k и называется крутизной выходной характеристики:  .
.
На рисунке 4.1.2 представлены выходные характеристики тахогенератора постоянного тока. Чем меньше сопротивление нагрузки, тем меньше крутизна.
 (холостой ход)
(холостой ход)
 Наибольшая крутизна при RНГ=µ, с уменьшением RНГ, крутизна уменьшается (кривые 1 и 2):
Наибольшая крутизна при RНГ=µ, с уменьшением RНГ, крутизна уменьшается (кривые 1 и 2):


 В реальном тахогенераторе DUЩ¹0, поэтому выходная характеристика пересекает ось ординат не в начале координат, а в точке U’Г (прямая 3): за счет падения напряжения на щеточном контакте.
В реальном тахогенераторе DUЩ¹0, поэтому выходная характеристика пересекает ось ординат не в начале координат, а в точке U’Г (прямая 3): за счет падения напряжения на щеточном контакте.
 (7)
(7)
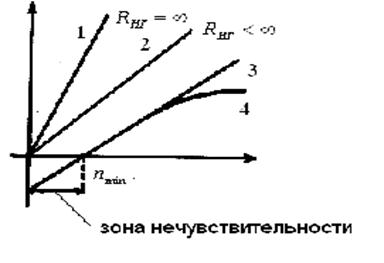
При n=0…nmin – зона нечувствительности. В этой зоне прибор не покажет напряжение.
Границу зоны нечувствительности можно определить, подставив в (7) UГ=0 и выразив n:

Рисунок 4.1.2
Наличие зоны нечувствительности является большим недостатком
тахогенераторов постоянного тока.
Для уменьшения зоны нечувствительности уменьшают сопротивление щеточного контакта rщ.

например, применяют металлографитовые щетки.
Если магнитная система тахогенератора насыщена и RНГ невелико, то магнитный поток Ф тахогенератора не остается постоянным при работе. Он уменьшается на величину DФ с увеличением частоты n за счет размагничивающего действия реакции якоря. Выходная характеристика тахогенератора отклоняется от прямолинейной - кривая 4.
Таким образом, у тахогенератора появляется погрешность, которая доходит до 3%. Чтобы устранить погрешность, вызванную реакцией якоря, уменьшают насыщение тахогенератора.
Но уменьшение насыщения приводит к появлению температурной погрешности, т.е. с температурой меняется сопротивление обмотки возбуждения (за счет электрических потерь и внешних воздействий).
Изменение сопротивления обмотки возбуждения приводит к изменению тока возбуждения
 , т.е.
, т.е.  .
.
Поток зависит от тока IВ:  , т.е. тоже и
, т.е. тоже и  , что ведет к изменению крутизны выходной характеристики.
, что ведет к изменению крутизны выходной характеристики.
Чтобы устранить температурную погрешность необходимо поддерживать постоянный магнитный поток. Это достигается двумя путями:
1. Выполнить машину насыщенной.
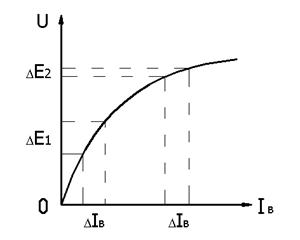
Если тахогенератор не насыщен, то изменение тока на DIВ ведет к большому изменению ЭДС (рис. 4.1.3).
При насыщении  стремится к нулю. Но при этом увеличиваются размеры обмотки возбуждения, т.е. масса машины. Кроме того, насыщение увеличивает размагничивающее действие реакции якоря, что
стремится к нулю. Но при этом увеличиваются размеры обмотки возбуждения, т.е. масса машины. Кроме того, насыщение увеличивает размагничивающее действие реакции якоря, что
рисунок 4.1.3 недопустимо при больших токах якоря.
2. Включить добавочное сопротивление rд, не зависящее от температуры (последовательно с обмоткой возбуждения).
 так, чтобы
так, чтобы  , т.е.
, т.е.
 , следовательно
, следовательно 
В последнее время выпускают тахогенераторы с возбуждением от постоянных магнитов.
 Достоинства таких тахогенераторов: Нет обмотки возбуждения, следовательно, температурная погрешность
Достоинства таких тахогенераторов: Нет обмотки возбуждения, следовательно, температурная погрешность
(от изменения ra) незначительная. Тахогенератор (рисунок 4.1.4) не требует источника питания, может использоваться там, где нет электропитания. Постоянный магнит обеспечивает большую стабильность магнитного потока.
Недостаток: изменение характеристик тахогенератора в связи со старением постоянных магнитов, особенно при эксплуатации в условиях тряски, вибрации.
Рисунок 4.1.4
Достоинства тахогенераторов постоянного тока:
1. Полное отсутствие фазовой погрешности и влияния на показатели характера нагрузки(индуктивной, активной, емкостной) – на величину выходного напряжения(т.к. работает на постоянном токе).
2. Высокая линейность выходной характеристики.
3. Малые габариты и масса при увеличении выходной мощности.
Недостатки тахогенераторов постоянного тока:
1. Нестабильность выходной характеристики из-за изменения переходного сопротивления контактов.
2. Появление зоны нечувствительности при малых частотах вращения якоря.
3. Несимметрия выходной характеристики – неравенство напряжения при вращении якоря в различных направлениях.
Возникает при неточности установки щеток на геометрической нейтрали, а также за счет смещения щеток в процессе эксплуатации.
Ошибка асимметрии выходного напряжения обычно выражается в процентах:

UПР – напряжение при правом вращении якоря;
UЛ – напряжение при левом вращении якоря с одинаковой частотой.
4.2 Исполнительные двигатели постоянного тока.
Используются для преобразования электрического сигнала в механическое перемещение вала.
Достоинства:
1. Высокое использование активных материалов машины КПД=40…70%.
2. Отсутствие самохода.
3. Устойчивая механическая характеристика независимо от параметров машины.
4. Высокая степень линейности характеристик.
5. Хорошее быстродействие.
6. Возможность получения теоретически любых частот вращения.
7. Возможность просто, плавно, экономично и в широком диапазоне регулировать частоту вращения.
8. Значительный пусковой момент.
9. Малые габариты и масса по сравнению с использованными двигателями постоянного тока.
Недостаток:
Наличие скользящего контакта между щетками и коллектором приводит к снижению надежности.
Конструктивно исполнительные двигатели постоянного тока представляют собой коллекторную машину, у которой обмотка якоря и обмотка возбуждения питаются от двух независимых источников питания. В исполнительных двигателях нет дополнительных полюсов, т.к. реакция якоря невелика и коммутация удовлетворительная.
Исполнительные двигатели работают в основном в переходном режиме, т.е. для них характерны частотные пуски, остановки, реверсы.
По способу управления различают исполнительные двигатели с якорным и полюсным управлением.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 1811; Нарушение авторских прав?; Мы поможем в написании вашей работы!