КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналитические методы исследования объектов управления
|
|
|
|
При аналитическом методе получения математического описания объектов управления необходимо достаточно полно изучить конструкцию агрегата, технологический процесс, протекающий в этом агрегате, Характер и направление протекания процессов соответствуют тем или иным физическим законам, математическая формулировка которых и определяет уравнение, которое может быть положено в основу анализа объекта. Как правило, в объектах управления протекают процессы массо- и теплопереноса, описание которых может быть получено с помощью дифференциальных уравнений. Однако в этом случае приходится прибегать к некоторым упрощениям. В частности, поскольку реальные объекты управления являются нелинейными, то в первую очередь следует линеаризовать нелинейные зависимости путем разложения заданных функций в ряд Тейлора. Кроме того, представляя объект как некоторую совокупность типовых элементарных звеньев, будут получены уравнения невысокой точности. Поэтому к этому методу прибегают при отсутствии самого объекта, т.е. на стадии его проектирования.
Рассмотрим пример составления дифференциального уравнения для астатического объекта управления, т.е. объекта без самовыравнивания (рис. 5.4).
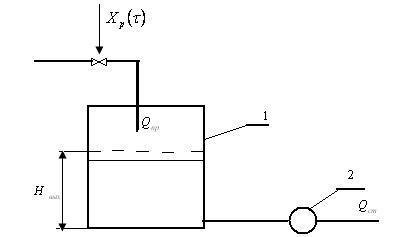
Рисунок 5.4 – Астатический объект управления
1 – объект управления; 2 – насос.
Для составления дифференциального уравнения воспользуемся материальным балансом. В состоянии равновесия клапан на трубопроводе подачи жидкости на входе открыт на определенную величину, при которой расход жидкости составляет Q пр, и в этом случае имеет место равенство:
Q пр =Q ст (5.3)
Величина притока жидкости определяется степенью открытия клапана:
 (5.4)
(5.4)
Изменение расхода жидкости на притоке вызовет изменение уровня жидкости в ёмкости
 (5.5)
(5.5)
Это приведет к изменению уровня жидкости в ёмкости:
 (5.6),
(5.6),
где S – площадь поверхности жидкости в ёмкости.
С другой стороны
 (5.7)
(5.7)
Приравнивая правые чести уравнений (5.6) и (5.7), получим
 (5.8)
(5.8)
Из уравнения (5.8) окончательно получим:
 (5.9)
(5.9)
Уравнение (5.9) очень часто записывают в виде:
 (5.10)
(5.10)
Найдем изменение выходной координаты при скачкообразном изменении входной координаты
 (5.11)
(5.11)
Изобразим графически процессы, протекающие в объекте управления (рис. 5.5)

Рисунок 5.5 – Кривая разгона объекта управления и изменения притока и стока
Объект управления, у которого реакция на скачкообразное воздействие представляет собой скорость изменения выходной координаты, пропорциональную возмущению, и выходная координата не приходит к новому установившемуся значению называют астатическими объектами или объектами без самовыравнивания.
Рассмотрим пример составления дифференциального уравнения для статического объекта с самовыравниванием (рис. 5.6).
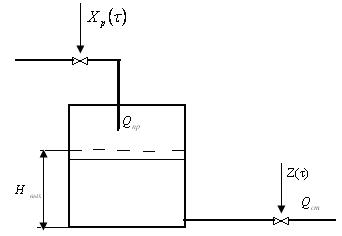
Рисунок 5.6 - Статический объект с самовыравниванием
Задача заключается в отыскании уравнения, связывающего выходную координату  и входную координату
и входную координату  . Запишем начальные условия
. Запишем начальные условия
 (5.12)
(5.12)
Переместим регулирующий орган на величину
 (5.13)
(5.13)
Или
 (5.14)
(5.14)
Расход жидкости на выходе ёмкости определяется равенством
 (5.15)
(5.15)
При ΔZ(τ)=0 получим
 (5.16)
(5.16)
Изменение объёма жидкости в ёмкости можно определить по формулам:
 (5.17)
(5.17)
 (5.18)
(5.18)
Из уравнения (5.18) получим
 (5.19)
(5.19)
Переходя к пределу и обозначая
 (5.20),
(5.20),
получим
 (5.21)
(5.21)
При скачкообразном изменении входной координаты получим кривую разгона
 (5.22)
(5.22)
Характер изменение выходной и входной координат приведен на рисунке 5.7. У данного объекта выходная координата при скачкообразном изменении входной координаты стремится к новому установившемуся значению. Объекты управления, у которых выходная
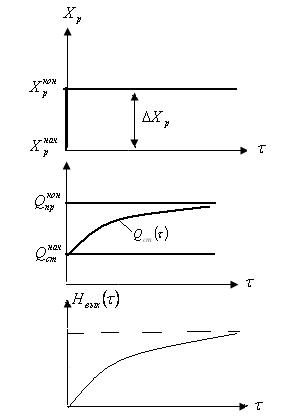
Рисунок 5.7 – Кривая разгона статического объекта и изменение притока и стока
координата при скачкообразном изменении входной координаты стремится к новому установившемуся значению называются статическими. Статические объекты в практике автоматизации производственных процессов встречаются чаще, чем астатические. Управление статическими объектами проще, чем астатическими.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1457; Нарушение авторских прав?; Мы поможем в написании вашей работы!