КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Планы скоростей и ускорений начального звена
|
|
|
|
Движение звена относительно основной системы отсчета называется абсолютным движением. Движение звена относительно подвижной системы отсчета называется относительным движением. Движение подвижной системы отсчета относительно основной называется переносным.
При сложном движении тела абсолютная(ое) скорость  (ускорение
(ускорение  ) точки равна векторной сумме переносной(го)
) точки равна векторной сумме переносной(го)  (
( ) и относительной (го)
) и относительной (го)  скоростей (ускорений) этой точки, т.е.
скоростей (ускорений) этой точки, т.е.
 (5.1)
(5.1)
 (5.2)
(5.2)
где  и
и  - соответственно нормальное ускорение в относительном движении, направленное по радиусу вращения точки к центру кривизны траектории (центру вращения) и касательное ускорение, направленное перпендикулярно радиусу вращения.
- соответственно нормальное ускорение в относительном движении, направленное по радиусу вращения точки к центру кривизны траектории (центру вращения) и касательное ускорение, направленное перпендикулярно радиусу вращения.
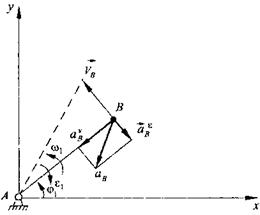
Если начальное звено механизма совершает вращательное движение, то скорость его любой точки например В, определится: если задана частота вращения n, то 
 ,
,
тогда: 
где  - скорость точки В, l АВ – кратчайшее расстояние от оси вращения до точки В,
- скорость точки В, l АВ – кратчайшее расстояние от оси вращения до точки В,  - угловая скорость звена АВ. Скорость точки В перпендикулярна прямой АВ, (
- угловая скорость звена АВ. Скорость точки В перпендикулярна прямой АВ, ( ), может быть изображена на плане скоростей (на рис.5.1 б) как вектор
), может быть изображена на плане скоростей (на рис.5.1 б) как вектор , модуль которого будет:
, модуль которого будет:
«рв» =  ,
,
где  - масштабный коэффициент скоростей.
- масштабный коэффициент скоростей.
«р» - полюс плана скоростей; «в» - одноименная точка на звене.
Аналогичным образом могут быть построены скорости любых других точек, принадлежавших этому звену.


 а) б) в)
а) б) в)
Рис. Скорости точки, ускорения и ее планы
б) – план скоростей для точки В начального звена
в) – план ускорений для точки В начального звена АВ.
На плане ускорений – вектор ускорений точки В - и ее составляющие:
и ее составляющие:  - нормальное и
- нормальное и  - касательное.
- касательное.
 ;
;  II АВ;
II АВ;  (
( масштабный коэффициент)
масштабный коэффициент)
 ;
;  (
( -угловая скорость звена)
-угловая скорость звена)
ускорение 
Ускорение других точек начинающего звена находятся и строятся аналогичным образом.
Определение скоростей и ускорений групп II класса методом планов
1. Рассмотрим группу II класса первого вида
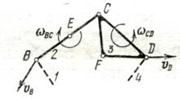 Кинемат. схема II класс 1 вид
Кинемат. схема II класс 1 вид

План скоростей II класс 1 вид
ДАНО: векторы абсолютных скоростей точек B, D.
векторы абсолютных скоростей точек B, D.
 векторы скоростей точки С относительно точек В и D.
векторы скоростей точки С относительно точек В и D.
Известны векторы скоростей точек В и D концевых элементов группы, которыми звенья 2 и 3 (присоединяются), входят в кинематические пары со звеньями 1 и 4 основного механизма, т.е. скорости  и
и  .
.
Требуется определить вектор  скорости т. С.
скорости т. С.
Движение т. С может быть разложено на переносно-поступательное со скоростью точки В или точки D и относительно-вращательное вокруг точки В или точки D. Тогда векторные уравнения для скорости точки С будут иметь вид:
 решая совместно уравнения получаем
решая совместно уравнения получаем
 (5.3)
(5.3)
Чтобы построить план скоростей, выбираем 
 ,
,
Масштаб  ;
; 
Выбираем в качестве полюса плана скоростей точку «р», где  , откладываем по направлению
, откладываем по направлению  и вектор рв
и вектор рв как и
как и  от нее отрезки (рв) и (рd), представляющие собой скорости точек
от нее отрезки (рв) и (рd), представляющие собой скорости точек  и
и  . Проведем через т. «в» и «d» прямые, имеющие направление векторов относительных скоростей
. Проведем через т. «в» и «d» прямые, имеющие направление векторов относительных скоростей  и
и  . Пересечение прямых даст т. «с». Точка «с» определит конец вектора
. Пересечение прямых даст т. «с». Точка «с» определит конец вектора  согласно (5.3) выражается отрезком (рс), соединяющим т. «р» с полученной точкой «с».
согласно (5.3) выражается отрезком (рс), соединяющим т. «р» с полученной точкой «с».
Величина этой скорости будет равна 
Отрезки (вс) и (dс) представляют собой относительные скорости  и
и  в том же масштабе, т.е.
в том же масштабе, т.е.

Треугольники рвс и рdc – называются планами скоростей звеньев № 2 и № 3, Фигура рвсdр – называется планом скоростей группы ВСD,
точка «р» - плана называется полюсом плана скоростей.
Пользуясь планом скоростей можно определить угловые скорости  и
и  звеньев № 2 и № 3. Если группа ВСD выполнена в произвольном масштабе
звеньев № 2 и № 3. Если группа ВСD выполнена в произвольном масштабе  то
то 
 ,
,  .
.
Для определения скорости какой либо точки Е, лежащей на оси звена ВС имеем векторное уравнение
Согласно этому уравнению из т. «в» плана скоростей проводим направление вектора  относительной скорости точки. Е вокруг точки. В. т.к. относительные скорости любых точек, лежащих на оси ВС звена 2,
относительной скорости точки. Е вокруг точки. В. т.к. относительные скорости любых точек, лежащих на оси ВС звена 2, ВС, то направление совпадает с направлением вектора скорости
ВС, то направление совпадает с направлением вектора скорости  , т.е. отрезок плана скоростей (ве), определяющий скорость
, т.е. отрезок плана скоростей (ве), определяющий скорость  совпадает по направлению с отрезком (вс). Величина отрезка определяется:
совпадает по направлению с отрезком (вс). Величина отрезка определяется:
 (1), и
(1), и
 (2)
(2)
разделив уравнение (2) на уравнение (1) получаем: 
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 444; Нарушение авторских прав?; Мы поможем в написании вашей работы!